




 本文探讨了大场景地图构建的挑战,强调了激光雷达与SLAM算法在其中的作用。针对闭环问题,介绍了粒子滤波SLAM和基于图优化的SLAM方法,分析了两者优缺点,指出Graph-SLAM在闭环检测和地图修正上的优势。
本文探讨了大场景地图构建的挑战,强调了激光雷达与SLAM算法在其中的作用。针对闭环问题,介绍了粒子滤波SLAM和基于图优化的SLAM方法,分析了两者优缺点,指出Graph-SLAM在闭环检测和地图修正上的优势。
开篇前试想这样两个场景:
在一个相对较小的地方(如房间),让你快速找某个东西,是不是很容易,很清楚自己在哪里,要怎么拿到他。
然后,把你放到一个大场景(如商场),在不熟悉的情况下,是不是有点慌?
这两个场景的典型区别就在于场景的大小不同,需要人处理的信息量不同。同理,机器人在初次面对的时候也会有点慌。但其实,只要清楚他的“地图构造”,再大的场景也不是问题。
目前,虽然即时地图构建和导航技术已经日益成熟,但是大规模场景下较大的环境面积及复杂的场景结构给地图构建带来了较大挑战。甚至在有些人眼里看来,这是工作量巨大的,繁琐的、构建不准确的……但其实,我们可以轻松完成10w+㎡场景下的地图构建,边走边建图,无需预先探明地图。
比如,这样的:

这样的:

以及这样的:

一个典型的商用场景特征如下:
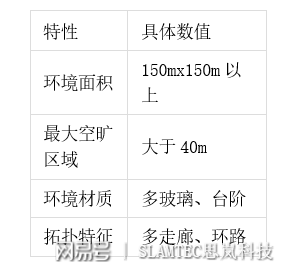
针对大场景的地图构建,如果使用激光雷达配合SLAM算法进行建图的话,首先需要使用较远测距半径的激光雷达传感器。目前为了适应上述的商用场景,行业内会使用测距半径在16米以上的激光雷达
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 10万+
10万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









