




环境准备
确保系统已安装 ROS Noetic 和 Gazebo,MoveIt 可通过以下命令安装:
sudo apt-get install ros-noetic-moveit*
sudo apt-get install ros-noetic-ros-controllers
sudo apt-get install ros-noetic-joint-state-controller
sudo apt-get install ros-noetic-effort-controllers
sudo apt-get install ros-noetic-position-controllers
创建工作空间并初始化:
mkdir -p ~/arm_ws/src
cd ~/arm_ws/
catkin_make
source devel/setup.bash
创建机械臂 URDF 模型
使用 xacro 文件定义六轴机械臂模型,或可以在网上找现成的urdf或xacro格式的机械臂模型。
<robot name="arm" xmlns:xacro="http://www.ros.org/wiki/xacro">
</robot>
配置 MoveIt 功能包
1、使用 MoveIt Setup Assistant 生成配置
source devel/setup.bash
roslaunch moveit_setup_assistant setup_assistant.launch
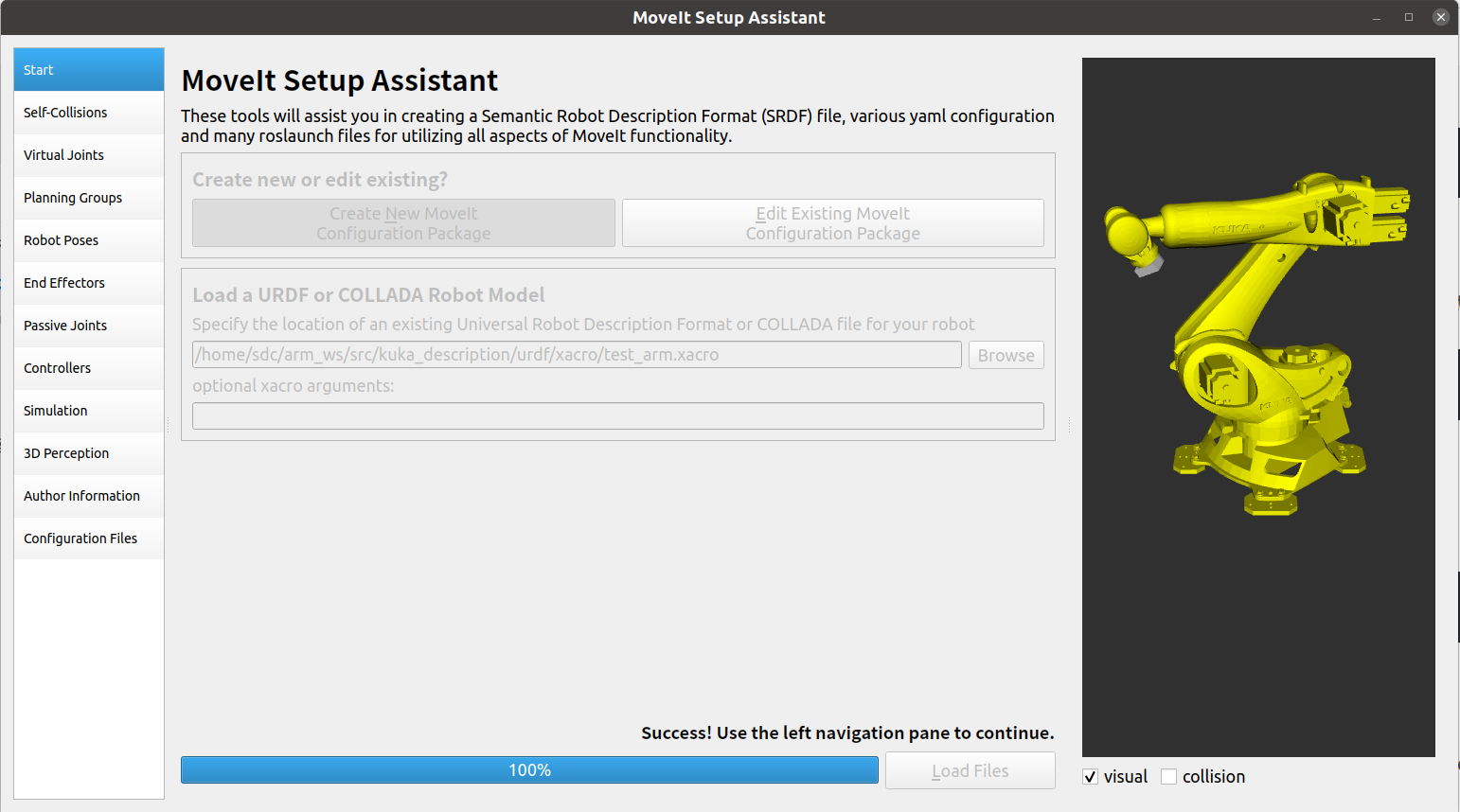
2、加载模型文件(Start)
点击创建新的配置包Create New Moveit Configuration Package后点击Browse,选择urdf或xarco文件,然后点击右下角的Load Files。
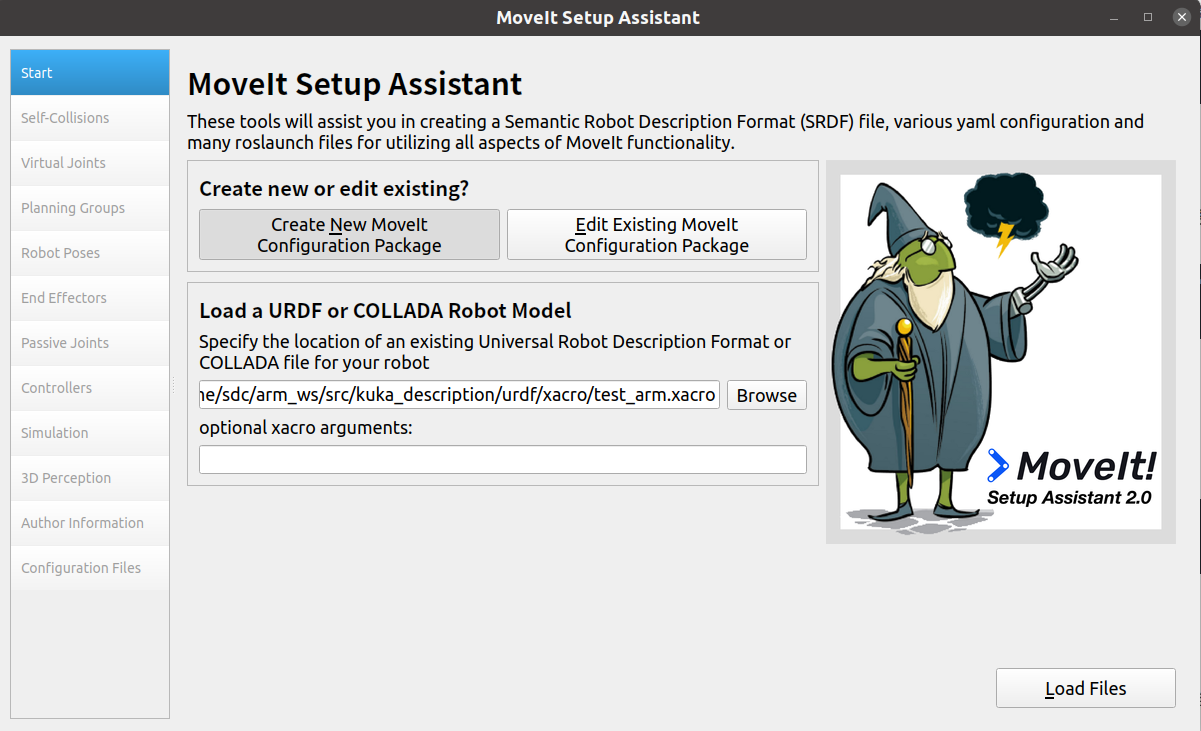
加载后右边会显示你的机械臂
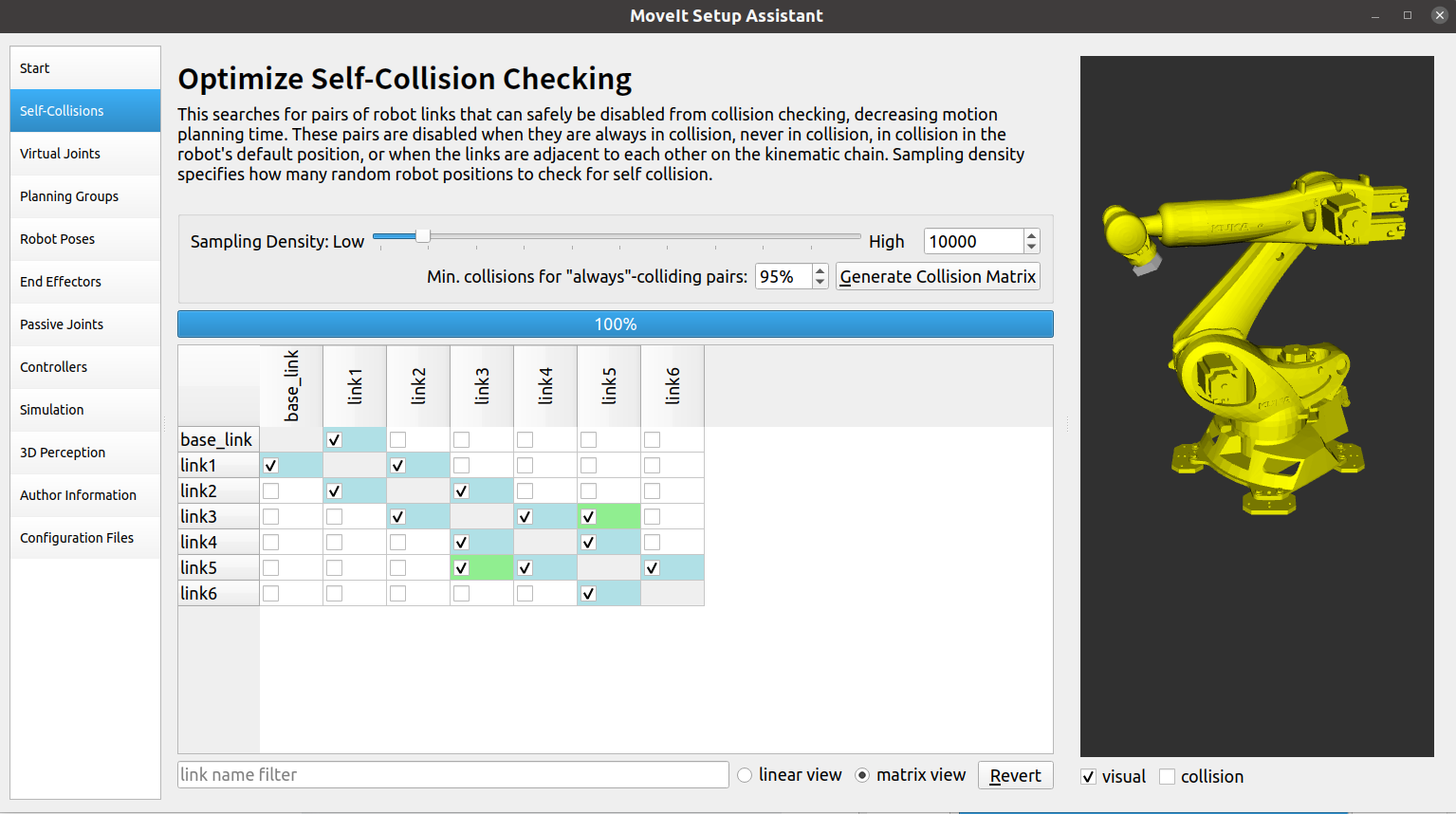
3、碰撞关节检测(Self-Collisions)
这里直接点击Generate Collision Matrix,生成碰撞关系
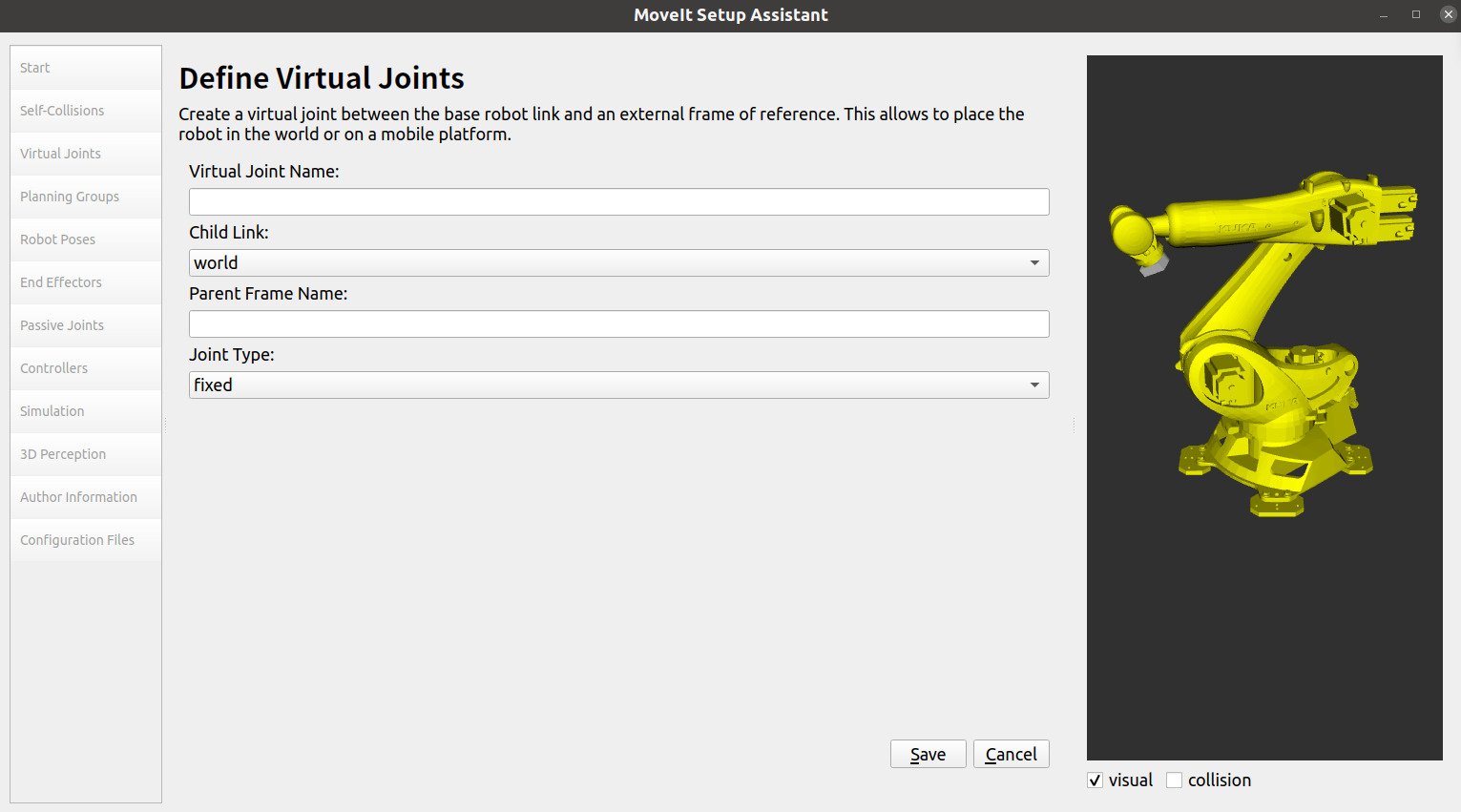
4、虚拟关节(Virtual Joints)
如果需要添加夹爪或者传感器,可以在这里配置需要的虚拟关节
5、规划组创建(Planning Groups)
这里点击Add Group创建规划组,机械臂,夹爪,其他传感器每个创建
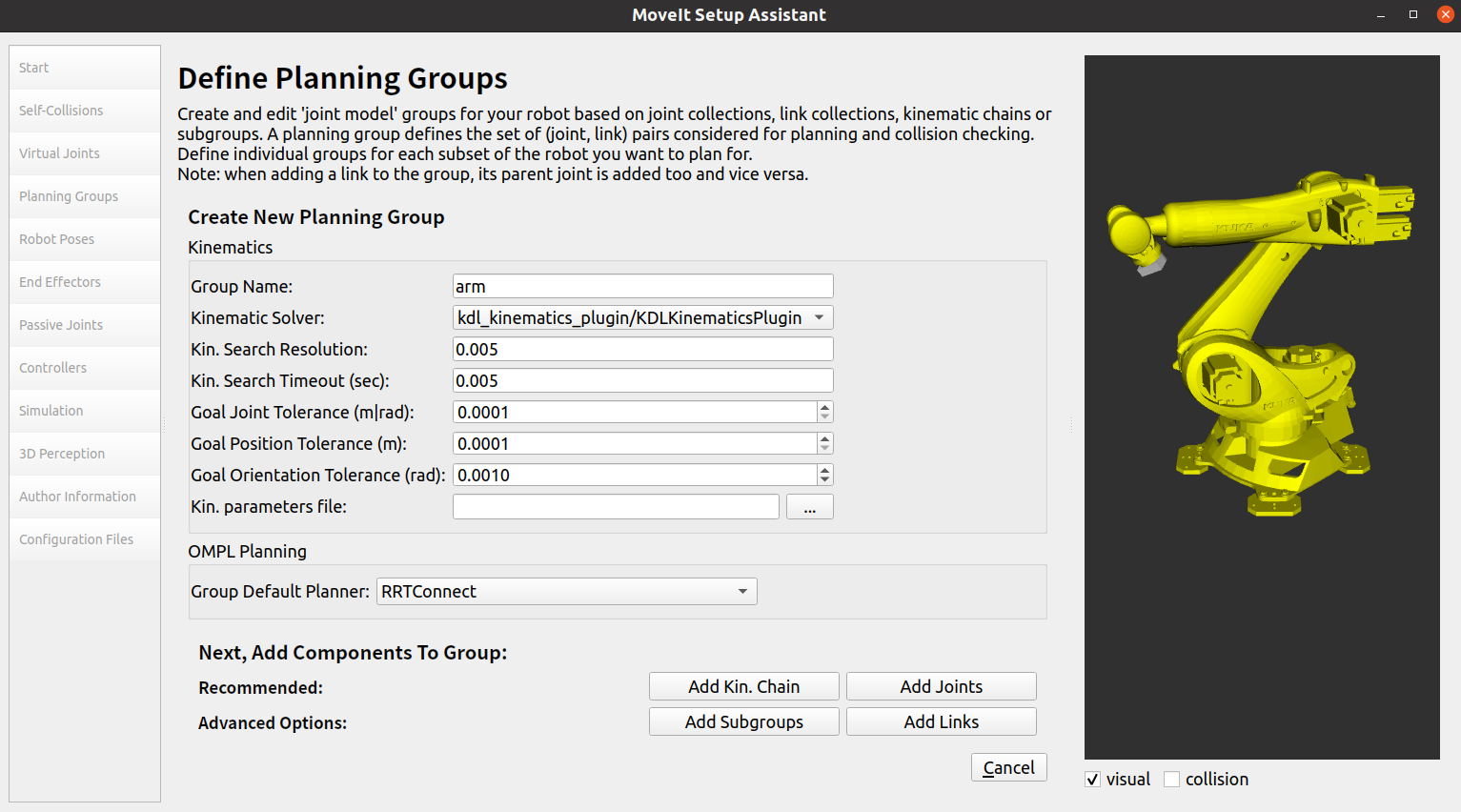
这里的Group Name填arm,然后Kinematic Solver选择kdl_kinematics_plugin/KDLKinematicsPlugin,其他不变,然后Group Default Planner选择RRTConnect,配置完点击Add Kin. Chain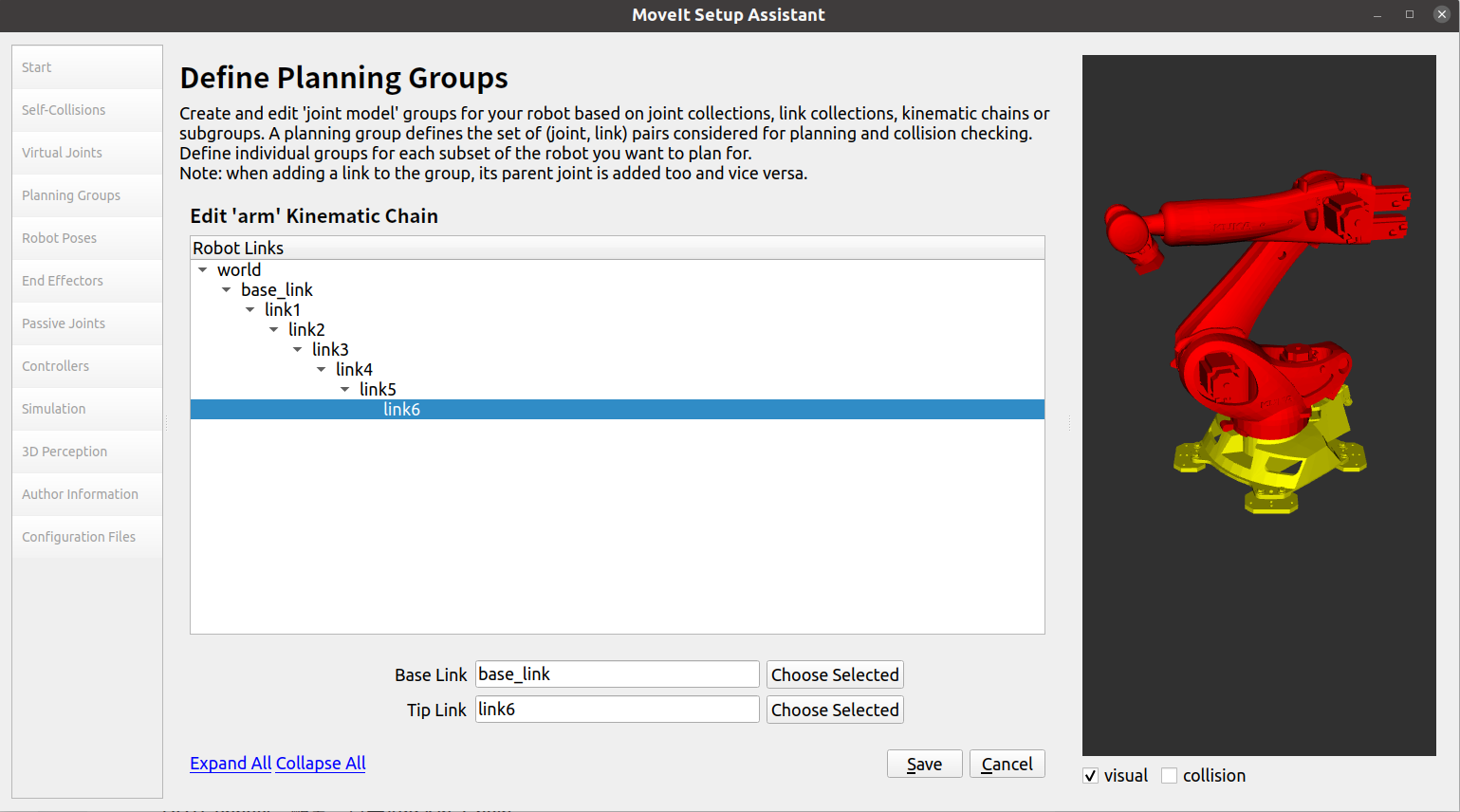
这里选择Base Link为base_link,Tip Link为link6,点击Save保存,完成机械臂组创建
如果有夹爪或者传感器,继续添加组,然后Group Name添加名字,Kinematic Solver和Group Default Planner选择None
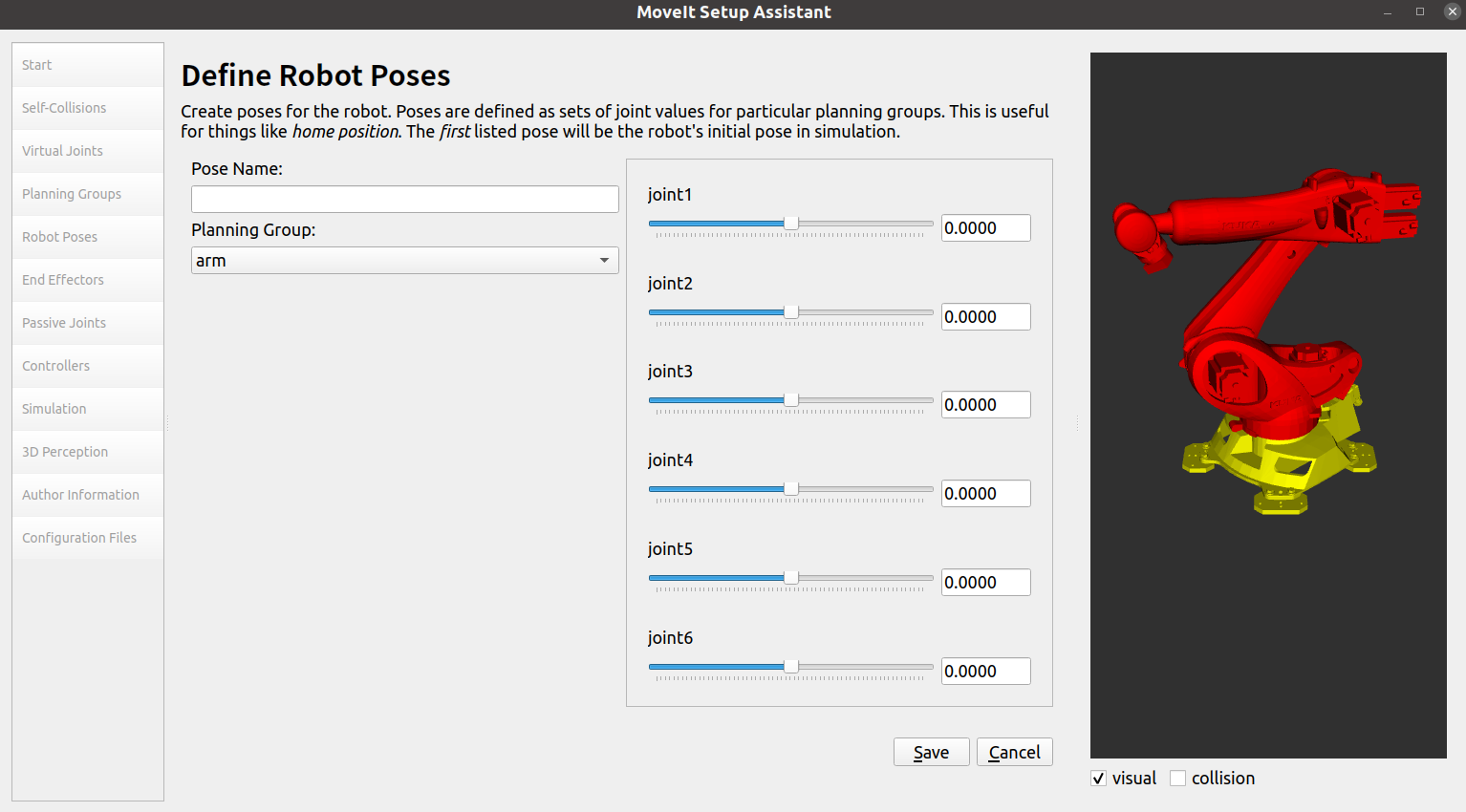
6、姿态添加(Robot Poses)
这里添加一个或则多个姿态,在rviz中可以快速修改姿态,点击Add Pose添加姿态,Pose Name命名姿态名,Planning Group选择组,然后给关节赋值-3.14~3.14,点击Save保存。
7、末端工具配置(End Effectors)
8、被动关节配置(Passive Joints)
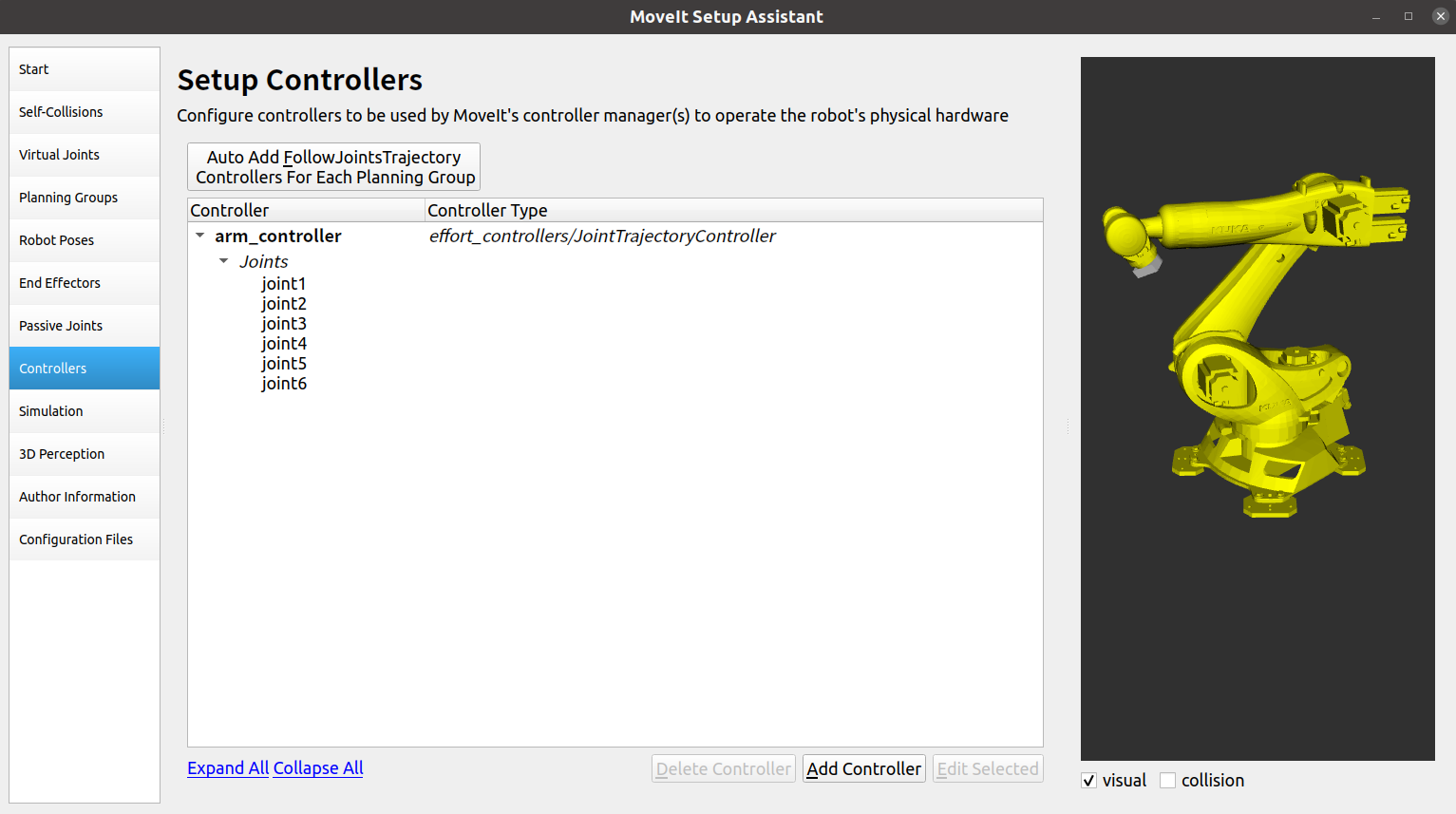
9、控制器配置(Controllers)
点击Auto Add FollowJointTrajectory Controllers For Each Planning Group生成控制器配置
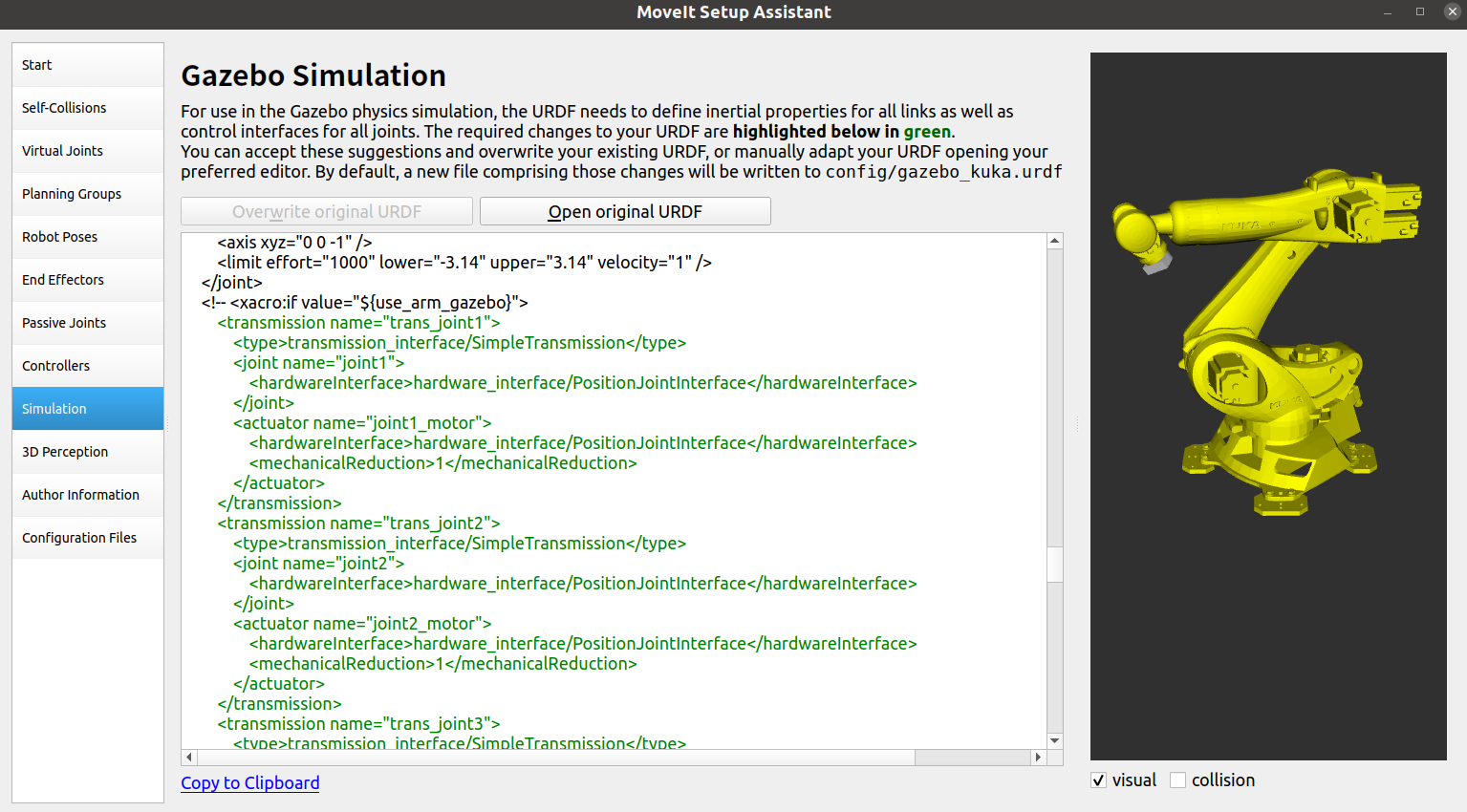
10、模型描述文件(Simulation)
通过上面配置后,moveit会帮我们重新生成一个urdf的文件,可以直接使用这个文件,或将绿色修改内容复制到自己的urdf或xacro中。
11、3D传感器配置(3D Perception)
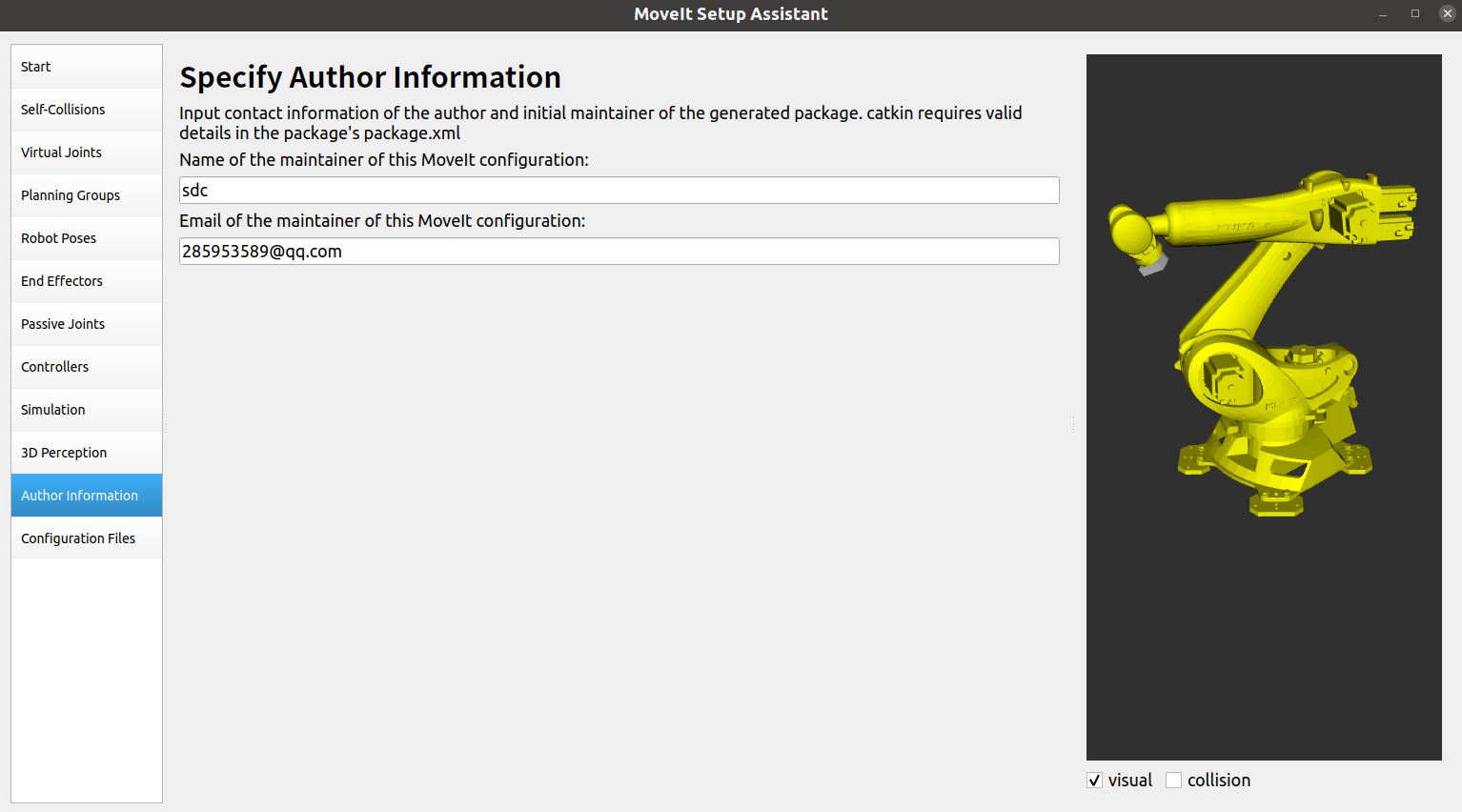
12、作者信息(Author Information)
这里一定要写
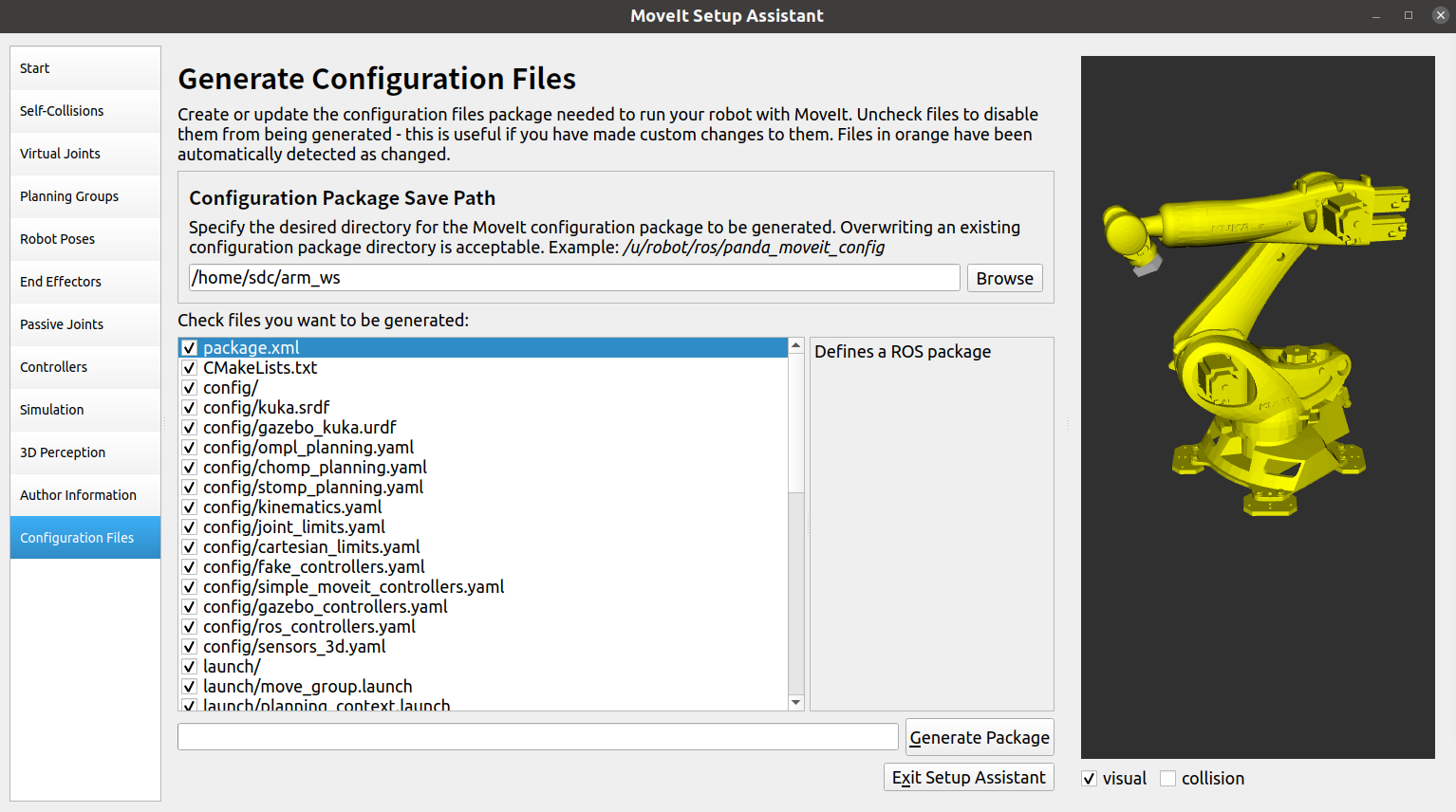
 13、创建配置包(Configuration Files)
13、创建配置包(Configuration Files)
点击Browse在src下创建一个新的arm_moveit_config包,然后点击Generate Package创建
配置参数
在生成的 arm_moveit_config包的launch下的gazebo.launch文件的第16行可以看到
<param name="robot_description" textfile="$(find arm_moveit_config)/config/arm.urdf" />
如果是模型文件是xacro文件,改为
<param name="robot_description" command="$(find xacro)/xacro --inorder '$(find arm_description)/urdf/xacro/arm.xacro'" />
运行仿真
启动 Gazebo 和 MoveIt:
source devel/setup.bash
roslaunch arm_moveit_config demo_gazebo.launch

















 3017
3017

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









