






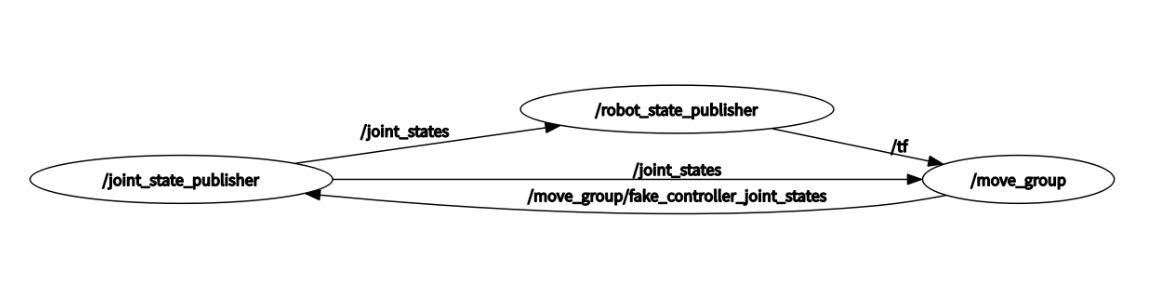
这个图示展示了一个典型的ROS节点和话题之间的关系,主要用于机器人控制和状态发布。下面是对图中每个部分的详细解释:
节点(Nodes)
-
/joint_state_publisher
-
功能:这个节点负责发布机器人的关节状态。它通常从机器人的硬件接口读取关节位置、速度等数据,并将这些数据转换为ROS标准消息格式,发布到相应的话题上。
-
输入:可能从传感器或其他节点接收原始的关节状态数据。
-
输出:发布到
/joint_states话题。
-
-
/robot_state_publisher
-
功能:这个节点使用URDF(统一机器人描述格式)文件来描述机器人模型,并结合从
/joint_states话题接收的关节状态数据,发布机器人的TF(变换)信息。这些信息描述了机器人各部分之间的空间关系。 -
输入:从
/joint_states话题接收关节状态数据。 -
输出:发布到
/tf话题。
-
-
/move_group
-
功能:这个节点是MoveIt!的一部分,用于高级运动规划和控制。它接收目标位置或路径,计算出实现这些目标的关节轨迹,并通过控制接口发送给机器人。
-
输入:从
/joint_states话题接收关节状态数据 -
输出:从话题
/move_group/fake_controller_joint_states将关节状态数据发布到机器人的驱动器。
-
话题(Topics)
-
/joint_states
-
含义:这个标准话题用于发布和订阅机器人关节的状态信息,包括位置、速度、力/力矩等。通常由机器人硬件接口或仿真器发布
-
数据类型:通常为
sensor_msgs/JointState。
-
-
/tf
-
含义:这个标准话题用于发布机器人的坐标变换信息,描述机器人各部分之间的空间关系。
-
数据类型:通常为
tf/tfMessage。
-
-
/move_group/fake_controller_joint_states
-
含义:这个特定话题用于MoveIt!中的模拟控制,位于
move_group命名空间下,发布模拟的关节状态数据,用于运动规划和模拟。当使用MoveIt!的仿真模式时,这个话题会发布规划后的关节状态,而不是真实的硬件反馈 -
数据类型:通常为
sensor_msgs/JointState。
-
数据流
-
/joint_state_publisher节点读取关节状态数据,并将其发布到/joint_states话题。 -
/robot_state_publisher节点订阅/joint_states话题,使用这些数据和URDF模型发布TF信息到/tf话题。 -
/move_group节点订阅/tf话题以获取机器人的当前状态,并可能订阅/move_group/fake_controller_joint_states话题以进行模拟控制。
这种架构允许机器人系统的不同部分(如状态监控、运动规划和执行)通过标准化的接口进行通信和协作,从而实现复杂的机器人控制任务。

















 1495
1495

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









