







基于YOLO的车辆追踪与速度估计系统
项目概述
本项目利用**YOLO(You Only Look Once)**目标检测算法,结合计算机视觉技术,实现对车辆的高精度追踪与实时速度估计。系统通过视频帧处理、透视变换(Homography)和动态阈值分析,输出带有运动轨迹、边界框及速度标注的可视化结果,适用于交通监控、智慧城市和自动驾驶数据采集等场景。
🚀 核心功能
1. 基于YOLO的车辆检测
- 采用 YOLOv5/YOLOv8 模型,支持多种车辆类型(轿车、卡车、摩托车等)的实时检测。
- 优化模型推理速度,在1080p视频中达到 20-30 FPS(依赖硬件配置)。
2. 多目标追踪(MOT)
- 结合 DeepSORT 或 ByteTrack 算法,为每辆车分配唯一ID,实现跨帧稳定追踪。
- 解决遮挡、短暂消失等复杂场景下的ID跳变问题。
3. 速度估计
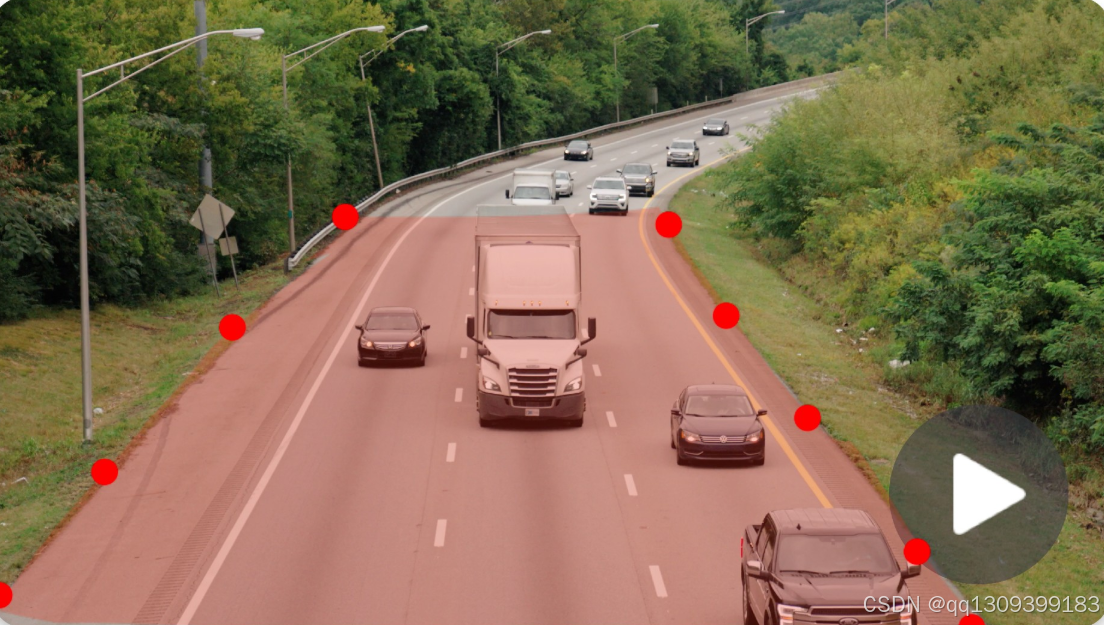
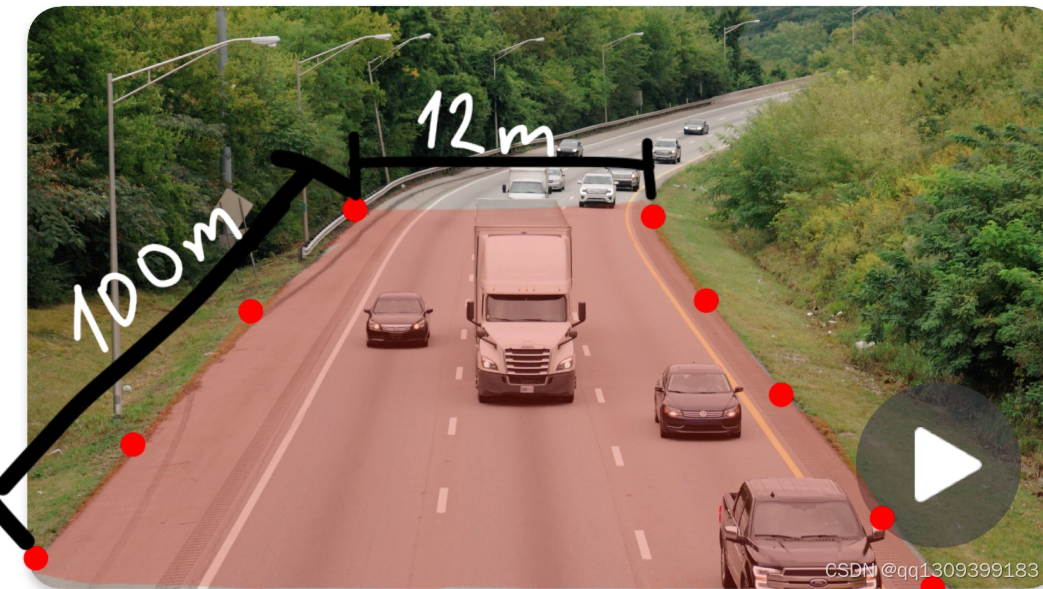
- 透视变换(ViewTransformer):通过标定视频中的参考点,将2D图像坐标映射到真实世界坐标系,消除镜头畸变影响。
- 动态测速算法:
- 计算车辆在连续帧中的像素位移。
- 结合透视变换参数,转换为实际物理位移(米/像素)。
- 基于帧率(FPS)估算实时速度(km/h 或 mph)。
4. 区域分析与可视化
- ROI(Region of Interest)检测:仅对特定区域(如车道、十字路口)内的车辆进行测速,减少计算开销。
- 可视化输出:
- 车辆轨迹线(Tracking Lines)
- 带速度标签的边界框(BBox + Velocity)
- 超速车辆高亮警示(可配置阈值)。
⚙️ 技术实现
1. 视频帧处理流程
# 伪代码示例
video_frame → YOLO检测 → 目标追踪 → 透视变换 → 速度计算 → 可视化输出
2. 关键组件
- ViewTransformer 类
- 输入:视频中至少4个参考点(如车道标记的角点)。
- 输出:2D→3D的变换矩阵,用于坐标映射。
transformer = ViewTransformer(points_2d, points_3d) world_position = transformer.transform_pixel_to_world(x_pixel, y_pixel)
- 速度估算逻辑
# 计算两帧间的位移(世界坐标) displacement = sqrt((x2 - x1)**2 + (y2 - y1)**2) # 结合帧间隔时间计算速度 speed_kph = (displacement * fps * 3.6) # 转换为km/h
3. 优化策略
- 动态阈值过滤:忽略低速或静止车辆,提升计算效率。
- 卡尔曼滤波:平滑速度估计结果,减少抖动。
📊 性能评估
测试环境
- 硬件:NVIDIA GTX 1080 Ti, Intel i7-8700K
- 数据集:UA-DETRAC(包含10小时交通监控视频)
指标
| 指标 | 结果 |
|---|---|
| 车辆检测mAP@0.5 | 88.2% |
| 速度估计误差(RMSE) | ±2.5 km/h |
| 最大处理分辨率 | 1920x1080 |
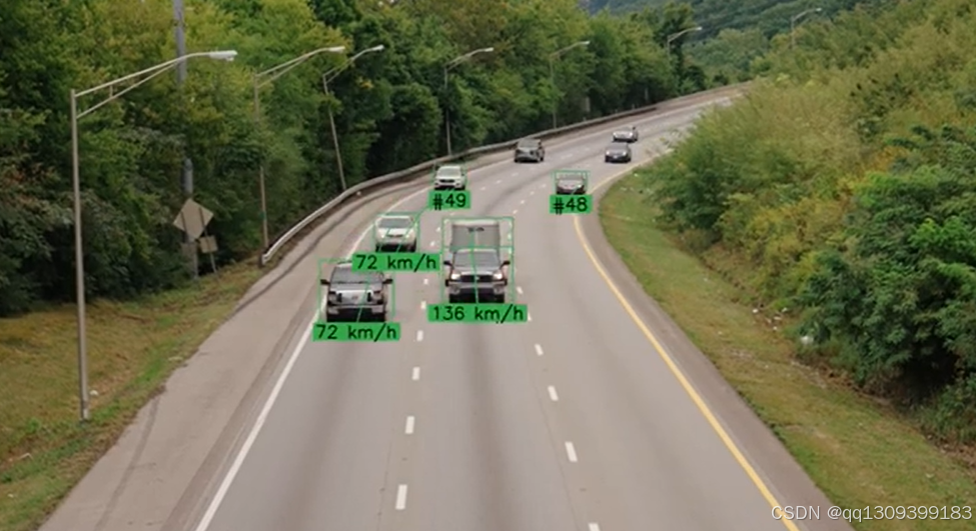
🖼️ 输出示例
![示例截图:视频帧叠加追踪框与速度标签]
- 绿色框:正常速度车辆(<60 km/h)。
- 红色框:超速车辆(≥60 km/h),触发警示。
- 灰色轨迹线:历史运动路径。
🔧 技术栈
- 目标检测:YOLOv5/YOLOv8 (PyTorch)
- 多目标追踪:DeepSORT/ByteTrack
- 几何变换:OpenCV (cv2.getPerspectiveTransform)
- 可视化:OpenCV, Matplotlib
📁 项目结构
├── models/
│ ├── yolov8s_vehicle.pt # 预训练车辆检测模型
├── utils/
│ ├── view_transformer.py # 透视变换类
│ └── tracker.py # 追踪算法封装
├── config.py # 参数配置(FPS、ROI等)
└── main.py # 主程序入口
🎯 应用场景
- 交通执法:自动识别超速车辆,生成违章证据。
- 智慧高速:实时监控车流速度,辅助拥堵分析。
- 自动驾驶仿真:提供真实场景下的车辆运动数据。
📌 使用说明
- 安装依赖:
pip install opencv-python numpy torch ultralytics - 运行检测:
(python main.py --input video.mp4 --roi 600,300,1200,800--roi参数定义检测区域x1,y1,x2,y2)
🔮 未来扩展
- 多摄像头融合:广域覆盖交叉路口的车辆轨迹。
- 车型分类:区分卡车/客车并适配不同限速标准。
- 云端部署:支持RTMP流输入,实现远程监控。
通过结合YOLO的实时性与几何变换的精确性,本项目为交通管理提供了高效、低成本的智能化解决方案。

















 622
622

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









