






本程序具有如下功能:
具有车流计数,车辆跟踪,超速报警等功能,包含了yolov11算法,opencv,pyqt,速度匹配算法,语音报警,数据库写入,html5等技术,CPU也可以跑
程序是用python实现的
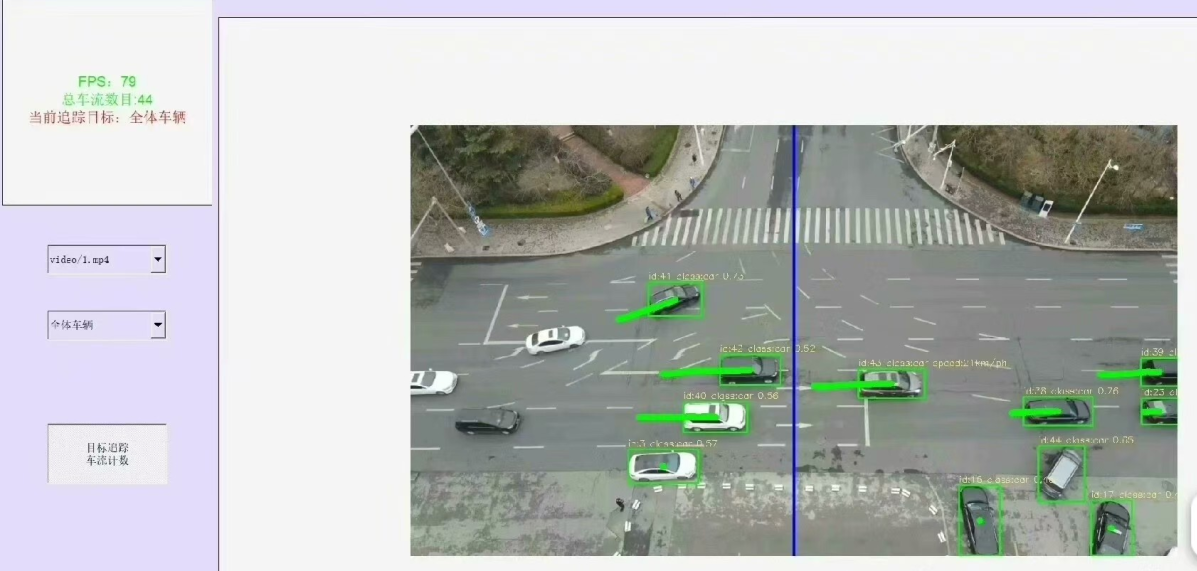
首先,将利用YOLOv11算法对视频中的车辆进行目标检测。YOLOv11以其出色的实时性能和准确性,在视频流中能够迅速准确地识别出车辆的位置和类别。这将为 后续的车辆跟踪和速度测量提供基础数据。
接着,将采用车辆跟踪算法(本文使用deepsort实现)对检测到的车辆进行持续跟踪。deepsort算法结合了运动信息和外观信息,能够在复杂场景中稳定地跟踪车辆,通过跟踪,可以获取车辆在不同帧之间的运动轨迹。
随后,有了车辆跟踪得到的运动轨迹,便可以采用帧间差分法来计算车辆的速度,得出车速。这些方法通过分析连续帧中车辆位置的变化,结合时间间隔,可以估算出车辆的速度。将根据具体的应用场景和需求,选择合适的速度测量方法,并确保其准确性和稳定性。
然后,在得到车辆速度后,这个是车辆在像素上的运行速度,需要将像素速度按比例的换算成实际速度,得到实际速度后,将设置一个速度阈值,用于判断车辆是否超速。如果车辆的速度超过阈值,系统将触发超速报警机制,并自动对超速车辆进行截图。截图将保存车辆在超速瞬间的图像,并包含必要的信息(如时间戳、速度值等),以便后续的分析和处理。
同时, 需要设计一个精心规划的数据存储模块。这个模块的主要任务是确保所有检测到的数据都能够被安全、有效地保存下来,以供后续的分析、查询或进一步处理。
最后,将设计一个用户友好的界面,用于展示系统的检测结果和截图。界面将实时显示视频中的车辆检测、跟踪和速度测量情况,并在检测到超速车辆时自动展示截图。同时,系统还可以提供数据导出功能,将检测结果和截图保存为文件,方便用户进行进一步的分析和处理。

















 1348
1348

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









