




麻省理工学院电气工程与计算机科学系Pulkit Agrawal教授,介绍了一种新方法,可以让机器人在扫描的家庭环境模拟中接受训练,为任何人都可以实现定制的家庭自动化铺平了道路。
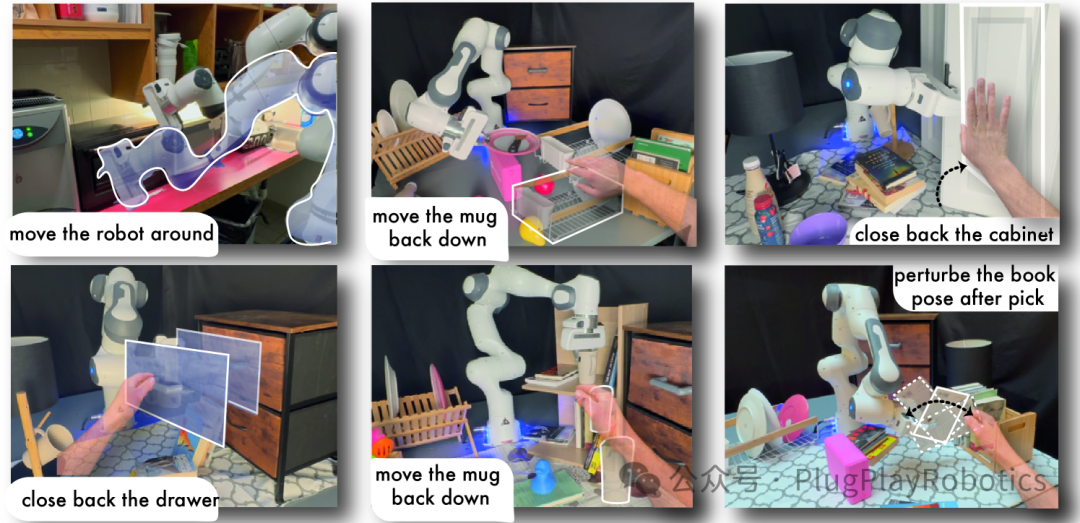
本文将探讨通过Franka机器人在虚拟环境中训练的特点,研究人员根据手机扫描结果对家庭场景用的机器人进行模拟训练
在许多自动化愿望清单中,排在首位的是一项特别耗时的任务:家务。
有很多原因导致您在家中看不到很多真实的机器人。其中最主要的是非结构化和半结构化环境的问题。没有两个家是相同的,从布局到照明到表面到人和宠物。即使机器人可以有效地绘制每个家庭的地图,空间也总是在变化。
近几十年来,模拟已成为机器人训练的基础要素。它允许机器人在现实世界中尝试完成任务并失败数千次甚至数百万次,而这些尝试和失败所需的时间与机器人在现实世界中尝试一次所需的时间相同。
模拟失败的后果也比现实生活中的后果要低得多。想象一下,教机器人把杯子放进洗碗机需要它在这个过程中打碎 100 个现实生活中的杯子。
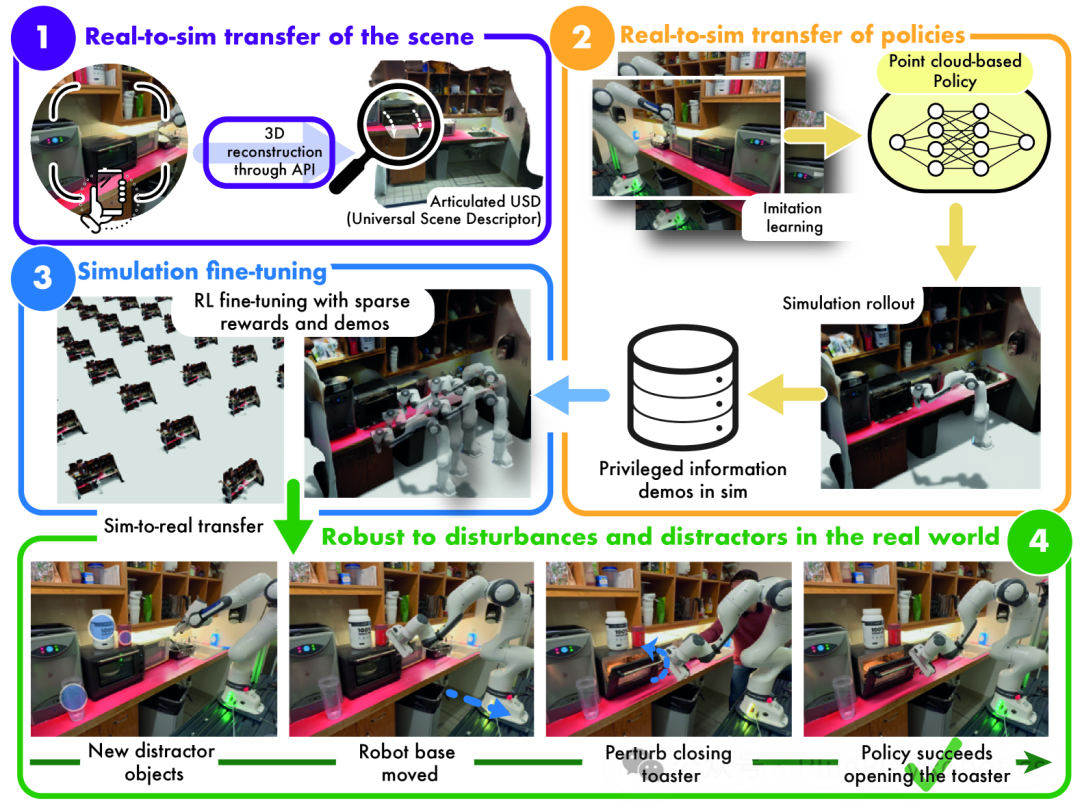
研究员 Pulkit Agrawal 在与研究相关的视频中表示:“在虚拟世界中进行模拟训练非常有效,因为机器人可以练习数百万次。它可能打碎了一千个盘子,但这并不重要,因为一切都在虚拟世界中。”然而,就像机器人本身一样,当涉及到家庭等动态环境时,模拟只能达到一定程度。使模拟变得像手机扫描一样容易,可以大大提高机器人对不
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1269
1269

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









