





列表:
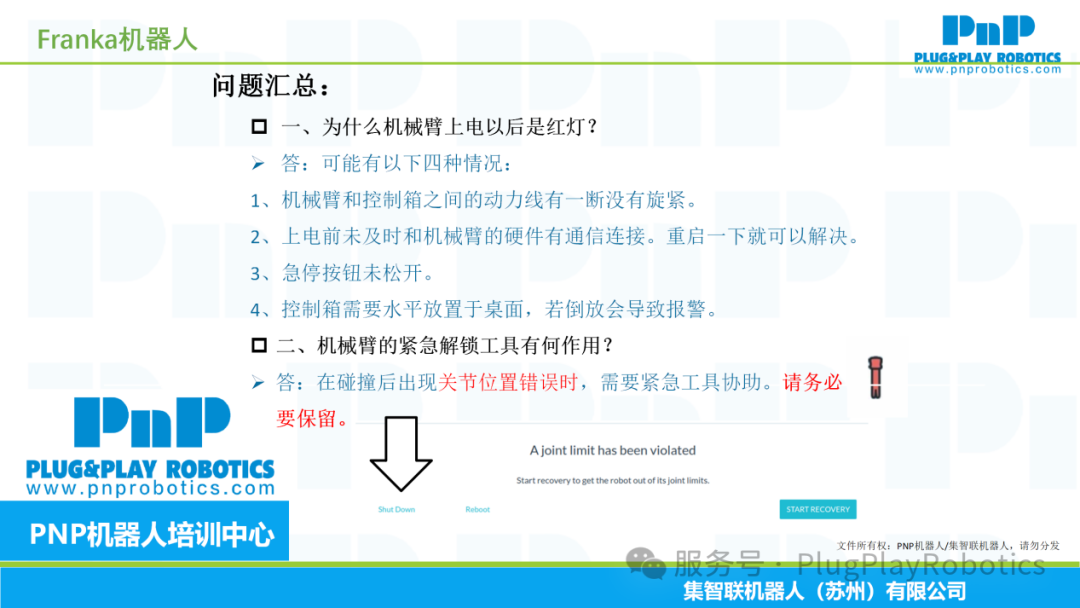
一、为什么机械臂上电以后是红灯?
二、机械臂的紧急解锁工具有何作用?
三、机械臂有多少种状态指示灯?各指示灯含义?
四、franka机械臂第一次如何进入desk?
五、franka机械臂怎么添加夹爪?
六、franka的夹爪怎么运动呢?
七、franka机械臂为什么不能自由拖动?
八、为什么激活FCI机械臂会报错?
九、franka机械臂的模型在哪里下载?
十、franka机械臂的开发资料在哪里?
列表:
一、为什么机械臂上电以后是红灯?
二、机械臂的紧急解锁工具有何作用?
三、机械臂有多少种状态指示灯?各指示灯含义?
四、franka机械臂第一次如何进入desk?
五、franka机械臂怎么添加夹爪?
六、franka的夹爪怎么运动呢?
七、franka机械臂为什么不能自由拖动?
八、为什么激活FCI机械臂会报错?
九、franka机械臂的模型在哪里下载?
十、franka机械臂的开发资料在哪里?

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























