




1、线性组合
对于若干个nnn维向量v⃗1, v⃗2, v⃗3,⋯ , v⃗p\vec v_{1},\ \vec v_{2},\ \vec v_{3},\cdots,\ \vec v_{p}v1, v2, v3,⋯, vp,则称 k1⋅v⃗1+ k2⋅v⃗2+ k3⋅v⃗3+⋯+ kp⋅v⃗pk_{1} \cdot \vec v_{1} + \ k_{2} \cdot \vec v_{2} + \ k_{3} \cdot \vec v_{3} + \cdots + \ k_{p} \cdot \vec v_{p}k1⋅v1+ k2⋅v2+ k3⋅v3+⋯+ kp⋅vp(kik_{i}ki是一个标量)这种形式为一个线性组合\color {red} {\small 一个线性组合}一个线性组合。
如矩阵高斯消元法中,一个行向量加(减)kkk倍的的另一个行向量这种操作就是一个线性组合,可以说矩阵中高斯约旦消元的结果的每一行 ,是原来矩阵各行的一个线性组合。
2、线性相关
对于若干个nnn维向量v⃗1, v⃗2, v⃗3,⋯ , v⃗p\vec v_{1},\ \vec v_{2},\ \vec v_{3},\cdots,\ \vec v_{p}v1, v2, v3,⋯, vp,若存在一组kkk不全为0,使得k1⋅v⃗1+ k2⋅v⃗2+ k3⋅v⃗3+⋯+ kp⋅v⃗p=0k_{1} \cdot \vec v_{1} + \ k_{2} \cdot \vec v_{2} + \ k_{3} \cdot \vec v_{3} + \cdots + \ k_{p} \cdot \vec v_{p} = 0k1⋅v1+ k2⋅v2+ k3⋅v3+⋯+ kp⋅vp=0,则称v⃗1, v⃗2, v⃗3,⋯ , v⃗p线性相关\vec v_{1},\ \vec v_{2},\ \vec v_{3},\cdots,\ \vec v_{p}\color {red} {\large\textbf{线性相关}}v1, v2, v3,⋯, vp线性相关。
换个意思说,线性相关的向量之间不是独立的,其中至少有一个向量可以用其余的向量来线性表示。
如对于 −2⋅r⃗1−13⋅r⃗2+r⃗3=0- 2 \cdot \vec r_{1} - \frac {1}{3} \cdot \vec r_{2} + \vec r_{3} = 0−2⋅r1−31⋅r2+r3=0
则有 r⃗3=2⋅r⃗1+13⋅r⃗2\vec r_{3} = 2 \cdot \vec r_{1} + \frac {1}{3} \cdot \vec r_{2}r3=2⋅r1+31⋅r2,意味着r⃗3\vec r_{3}r3可以表示成r⃗1\vec r_{1}r1和r⃗2\vec r_{2}r2的线性组合,所以r⃗1,r⃗2,r⃗3\vec r_{1}, \vec r_{2}, \vec r_{3}r1,r2,r3是线性相关的。
对于命题: 如果v⃗1, v⃗2, v⃗3,⋯ , v⃗n\vec v_{1},\ \vec v_{2},\ \vec v_{3},\cdots,\ \vec v_{n}v1, v2, v3,⋯, vn线性相关⇔\Leftrightarrow⇔其中一个向量可以表示成其它向量的线性组合 ,可证:
因为v⃗1, v⃗2, v⃗3,⋯ , v⃗n\vec v_{1},\ \vec v_{2},\ \vec v_{3},\cdots,\ \vec v_{n}v1, v2, v3,⋯, vn线性相关,则存在一组不全为0的k1,k2,k3,⋯ ,knk_{1},k_{2},k_{3},\cdots ,k_{n}k1,k2,k3,⋯,kn使得k1⋅v⃗1+ k2⋅v⃗2+ k3⋅v⃗3+⋯+ kn⋅v⃗p=0k_{1} \cdot \vec v_{1} + \ k_{2} \cdot \vec v_{2} + \ k_{3} \cdot \vec v_{3} + \cdots + \ k_{n} \cdot \vec v_{p} = 0k1⋅v1+ k2⋅v2+ k3⋅v3+⋯+ kn⋅vp=0。
设ki≠0→ki⋅v⃗i=−k1⋅v⃗1−k2⋅v⃗2−⋯−ki−1⋅v⃗i−1−ki+1⋅v⃗i+1−⋯−kn⋅v⃗nk_{i} \neq 0 \to k_{i} \cdot \vec v_{i} = -k_{1} \cdot \vec v_{1} - k_{2} \cdot \vec v_{2} - \cdots - k_{i-1} \cdot \vec v_{i-1} - k_{i+1} \cdot \vec v_{i+1} - \cdots - k_{n} \cdot \vec v_{n}ki=0→ki⋅vi=−k1⋅v1−k2⋅v2−⋯−ki−1⋅vi−1−ki+1⋅vi+1−⋯−kn⋅vn
可得 v⃗i=(−k1⋅v⃗1−k2⋅v⃗2−⋯−ki−1⋅v⃗i−1−ki+1⋅v⃗i+1−⋯−kn⋅v⃗n)/ki\vec v_{i} =(-k_{1} \cdot \vec v_{1} - k_{2} \cdot \vec v_{2} - \cdots - k_{i-1} \cdot \vec v_{i-1} - k_{i+1} \cdot \vec v_{i+1} - \cdots - k_{n} \cdot \vec v_{n}) / k_{i}vi=(−k1⋅v1−k2⋅v2−⋯−ki−1⋅vi−1−ki+1⋅vi+1−⋯−kn⋅vn)/ki,满足 线性组合\color {red} { \small线性组合}线性组合 的定义。即使等式右侧的 kkk 全部为0,说明 v⃗i\vec v_{i}vi 是其它向量是相关,且是它们的0倍。
3、线性无关
对于若干个nnn维向量v⃗1, v⃗2, v⃗3,⋯ , v⃗p\vec v_{1},\ \vec v_{2},\ \vec v_{3},\cdots,\ \vec v_{p}v1, v2, v3,⋯, vp,只有kkk全为0时,才有k1⋅v⃗1+ k2⋅v⃗2+ k3⋅v⃗3+⋯+ kp⋅v⃗p=0k_{1} \cdot \vec v_{1} + \ k_{2} \cdot \vec v_{2} + \ k_{3} \cdot \vec v_{3} + \cdots + \ k_{p} \cdot \vec v_{p} = 0k1⋅v1+ k2⋅v2+ k3⋅v3+⋯+ kp⋅vp=0,则称v⃗1, v⃗2, v⃗3,⋯ , v⃗p线性无关\vec v_{1},\ \vec v_{2},\ \vec v_{3},\cdots,\ \vec v_{p}\color {red} {\small \textbf{线性无关}}v1, v2, v3,⋯, vp线性无关。
线性无关意味着任何一个向量都无法表示为其它向量的线性组合。
在求证线性相关,线性无关的时候,常用反证法
求证nnn维标准单位向量e⃗1=[1,0,0,...,0],e⃗2=[0,1,0,...,0],e⃗3=[0,0,1,...,0],⋯ ,e⃗n=[0,0,0,...,1]\vec e_{1}=[1,0,0,...,0],\vec e_{2}=[0,1,0,...,0],\vec e_{3}=[0,0,1,...,0],\cdots ,\vec e_{n}=[0,0,0,...,1]e1=[1,0,0,...,0],e2=[0,1,0,...,0],e3=[0,0,1,...,0],⋯,en=[0,0,0,...,1]是一个线性无关组。
反证法证明:
假设e⃗1,e⃗2,e⃗3,⋯ ,e⃗n\vec e_{1},\vec e_{2},\vec e_{3},\cdots ,\vec e_{n}e1,e2,e3,⋯,en线性相关,则一定存在一组不全为0的k;
使得k1⋅e⃗1+ k2⋅e⃗2+ k3⋅e⃗3+⋯+ kp⋅e⃗n=0k_{1} \cdot \vec e_{1} + \ k_{2} \cdot \vec e_{2} + \ k_{3} \cdot \vec e_{3} + \cdots + \ k_{p}\cdot \vec e_{n} =0k1⋅e1+ k2⋅e2+ k3⋅e3+⋯+ kp⋅en=0
假设ki≠0k_{i} \neq 0ki=0, ki⋅e⃗i=−k1⋅e⃗1−k2⋅e⃗2−⋯−ki−1⋅e⃗i−1−ki+1⋅e⃗i+1−⋯−kn⋅e⃗nk_{i} \cdot \vec e_{i} = -k_{1} \cdot \vec e_{1} - k_{2} \cdot \vec e_{2} - \cdots - k_{i-1} \cdot \vec e_{i-1} - k_{i+1} \cdot \vec e_{i+1} - \cdots - k_{n} \cdot \vec e_{n}ki⋅ei=−k1⋅e1−k2⋅e2−⋯−ki−1⋅ei−1−ki+1⋅ei+1−⋯−kn⋅en
就有ei=(−k1⋅e⃗1−k2⋅e⃗2−⋯−ki−1⋅e⃗i−1−ki+1⋅e⃗i+1−⋯−kn⋅e⃗n)/kie_{i} =( -k_{1} \cdot \vec e_{1} - k_{2} \cdot \vec e_{2} - \cdots - k_{i-1} \cdot \vec e_{i-1} - k_{i+1} \cdot \vec e_{i+1} - \cdots - k_{n} \cdot \vec e_{n})/k_{i}ei=(−k1⋅e1−k2⋅e2−⋯−ki−1⋅ei−1−ki+1⋅ei+1−⋯−kn⋅en)/ki
e⃗\vec ee向量是一个nnn维向量,上式展开可得
e⃗i=(−k1/ki,−k2/ki,−⋯−ki−1/ki−,0,ki+1/ki−⋯−kn/ki)\vec e_{i} =( -k_{1} /k_{i} ,- k_{2} /k_{i}, - \cdots - k_{i-1} /k_{i} -,0, k_{i+1} /k_{i} - \cdots - k_{n} /k_{i})ei=(−k1/ki,−k2/ki,−⋯−ki−1/ki−,0,ki+1/ki−⋯−kn/ki)
∵e⃗i\because \vec e_{i}∵ei 向量在iii位置的元素值应为1,与上式计算的e⃗i\vec e_{i}ei在iii位置的元素为0相矛盾;
∴\therefore∴ 假设不成立,得证nnn维标准单位向量间是一个线性无关组。
4、线性相关的重要性质
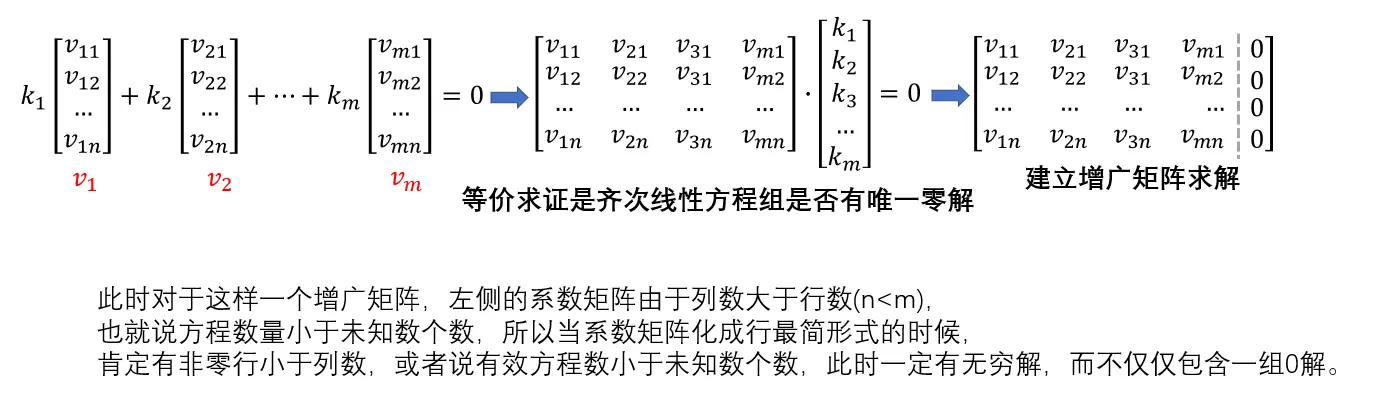
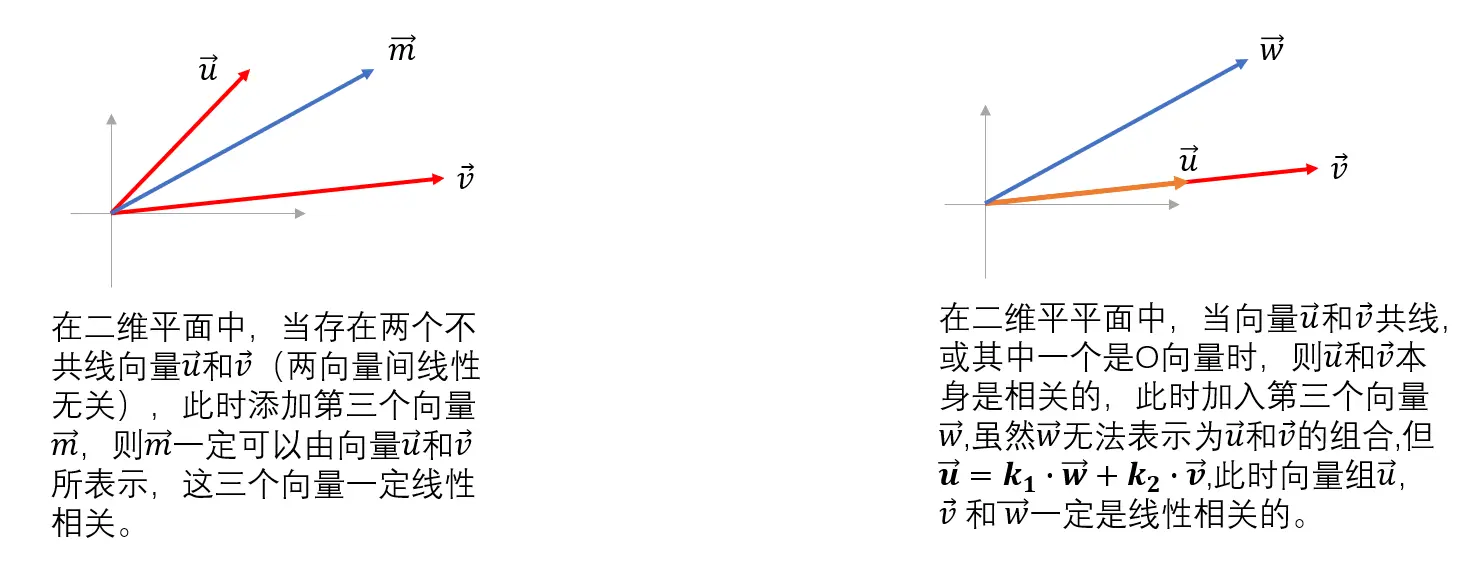
性质1 对于m个n维向量,v⃗1, v⃗2, v⃗3,⋯ , v⃗m\vec v_{1},\ \vec v_{2},\ \vec v_{3},\cdots,\ \vec v_{m}v1, v2, v3,⋯, vm,若m>nm>nm>n,则v⃗1, v⃗2, v⃗3,⋯ , v⃗m\vec v_{1},\ \vec v_{2},\ \vec v_{3},\cdots,\ \vec v_{m}v1, v2, v3,⋯, vm线性相关。
如4个3维向量一定线性相关!\color {skyblue} {\small {如4个3维向量一定线性相关! }}如4个3维向量一定线性相关!
证明该命题等价于求证,是否存在一组k1,k2,k3,⋯ ,kmk_{1},k_{2},k_{3},\cdots ,k_{m}k1,k2,k3,⋯,km不全为0,满足k1⋅v⃗1+ k2⋅v⃗2+ k3⋅v⃗3+⋯+ km⋅v⃗m=0k_{1} \cdot \vec v_{1} + \ k_{2} \cdot \vec v_{2} + \ k_{3} \cdot \vec v_{3} + \cdots + \ k_{m} \cdot \vec v_{m} = 0k1⋅v1+ k2⋅v2+ k3⋅v3+⋯+ km⋅vm=0
∴\therefore∴ 对于m个n维向量,肯定会有一组kkk不全为0,满足这m个向量线性相关。
性质2 对于m个n维向量,v⃗1, v⃗2, v⃗3,⋯ , v⃗m\vec v_{1},\ \vec v_{2},\ \vec v_{3},\cdots,\ \vec v_{m}v1, v2, v3,⋯, vm,若m=nm=nm=n,且有向量v⃗\vec vv构成的系数矩阵A可逆的时候,则v⃗1, v⃗2, v⃗3,⋯ , v⃗m\vec v_{1},\ \vec v_{2},\ \vec v_{3},\cdots,\ \vec v_{m}v1, v2, v3,⋯, vm 线性无关。
∵\because∵ 求证向量组 v⃗\vec vv线性无关,等于说求证存在一组常数kkk全为0,使得k1⋅v⃗1+ k2⋅v⃗2+ k3⋅v⃗3+⋯+ km⋅v⃗m=0k_{1} \cdot \vec v_{1} + \ k_{2} \cdot \vec v_{2} + \ k_{3} \cdot \vec v_{3} + \cdots + \ k_{m} \cdot \vec v_{m} = 0k1⋅v1+ k2⋅v2+ k3⋅v3+⋯+ km⋅vm=0
等价于求证 由向量 v⃗\vec vv 和常数 kkk 组成的齐次线性方程组A⋅k=0A \cdot k =0A⋅k=0有唯一解
∵\because∵ 矩阵AAA可逆,就有A−1⋅A⋅k=0A^{-1} \cdot A \cdot k = 0A−1⋅A⋅k=0,所以常数组kkk一定是0向量,kkk只有唯一零解。
A=(v⃗1,v⃗2,⋯ ,v⃗n)A = ( \vec v_{1}, \vec v_{2},\cdots , \vec v_{n})A=(v1,v2,⋯,vn)
A可逆⇔v⃗1,v⃗2,⋯ ,v⃗n线性无关A可逆 \Leftrightarrow \vec v_{1}, \vec v_{2},\cdots , \vec v_{n}线性无关A可逆⇔v1,v2,⋯,vn线性无关
性质3 若向量v⃗1, v⃗2, v⃗3,⋯ , v⃗p\vec v_{1},\ \vec v_{2},\ \vec v_{3},\cdots,\ \vec v_{p}v1, v2, v3,⋯, vp中存在零向量,则v⃗1, v⃗2, v⃗3,⋯ , v⃗p\vec v_{1},\ \vec v_{2},\ \vec v_{3},\cdots,\ \vec v_{p}v1, v2, v3,⋯, vp线性相关。
从定义出发,线性相关意味着存在一组kkk不全为0,使得k1⋅v⃗1+ k2⋅v⃗2+ k3⋅v⃗3+⋯+ kp⋅v⃗p=0k_{1} \cdot \vec v_{1} + \ k_{2} \cdot \vec v_{2} + \ k_{3} \cdot \vec v_{3} + \cdots + \ k_{p} \cdot \vec v_{p} = 0k1⋅v1+ k2⋅v2+ k3⋅v3+⋯+ kp⋅vp=0。
因为在这个情况下,与零向量OOO相乘的kik_{i}ki可以取任意值,哪怕其它kkk的值都为0,也总能存在一组kkk不全为0使得k1⋅v⃗1+ k2⋅v⃗2+ k3⋅v⃗3+⋯+ kp⋅v⃗p=0k_{1} \cdot \vec v_{1} + \ k_{2} \cdot \vec v_{2} + \ k_{3} \cdot \vec v_{3} + \cdots + \ k_{p} \cdot \vec v_{p} = 0k1⋅v1+ k2⋅v2+ k3⋅v3+⋯+ kp⋅vp=0,符合线性相关定义,因为任意一个向量都可以由
5、从向量表达信息层面理解
一组向量线性相关,表示这组向量出现了信息冗余,因为一个向量可以被另一个向量的线性组合所表示,意味着这个向量本身其实并没有表达新的信息。反之,一组向量线性无关,意味着信息完全不冗余,对于这组向量来说所有向量都是独立的。



















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











