



 本文详细介绍了如何在Windows 10(PC端)与运行Ubuntu的机器人之间通过VNC进行远程连接,并实现共享文件夹和映射网络驱动器。通过这些步骤,用户可以在PC端直接操作机器人端的文件,使用高级开发工具,提升开发效率。
本文详细介绍了如何在Windows 10(PC端)与运行Ubuntu的机器人之间通过VNC进行远程连接,并实现共享文件夹和映射网络驱动器。通过这些步骤,用户可以在PC端直接操作机器人端的文件,使用高级开发工具,提升开发效率。
PC端(win10)与机器人端(ubuntu)的远程连接
闲来垂钓碧溪上。10月12日下午我代表深圳技术大学思涛战队前往NXROBO创想未来公司,与该公司的工程师进行交流,向他们请教学习,此行的确获益匪浅,在该过程中我学到了一招:在PC端与机器人端通过 共享文件 和 映射网络驱动器 建立远程连接,实现在PC端使用多种开发工具直接修改机器人端的代码、共享文件夹文件结构等,而不需要在缺乏开发工具的机器人端安装系列开发工具,更不需要在搭载ubuntu系统的机器人端使用落后的开发工具如gedit、记事本等,方便好用。so,分享一下操作:
1.首先通过VNC连接PC和机器人
此操作需先保证PC和机器人连接到同一个局域网或手机热点上,由于本次比赛的机器人连接到手机热点时运行比较流畅,所以我主要讲解连接到手机热点的操作。
PC端:
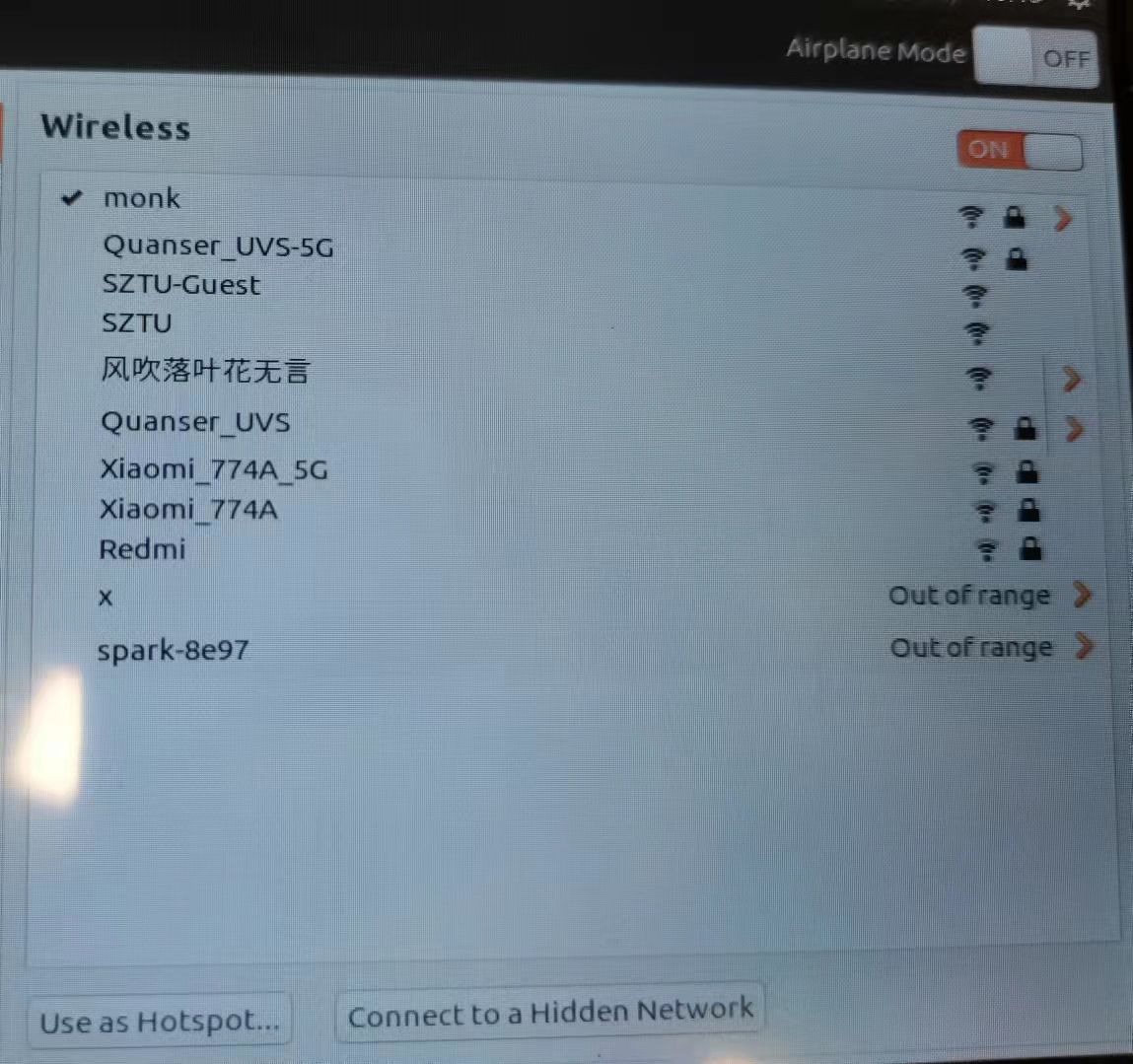
机器人端:
然后,通过在VNC输入服务器地址和密码,连接PC和机器人

成功连接后,可以直接在VNC中操作机器人端

2.在VNC中打开机器人ubuntu系统的home目录,实现共享文件夹
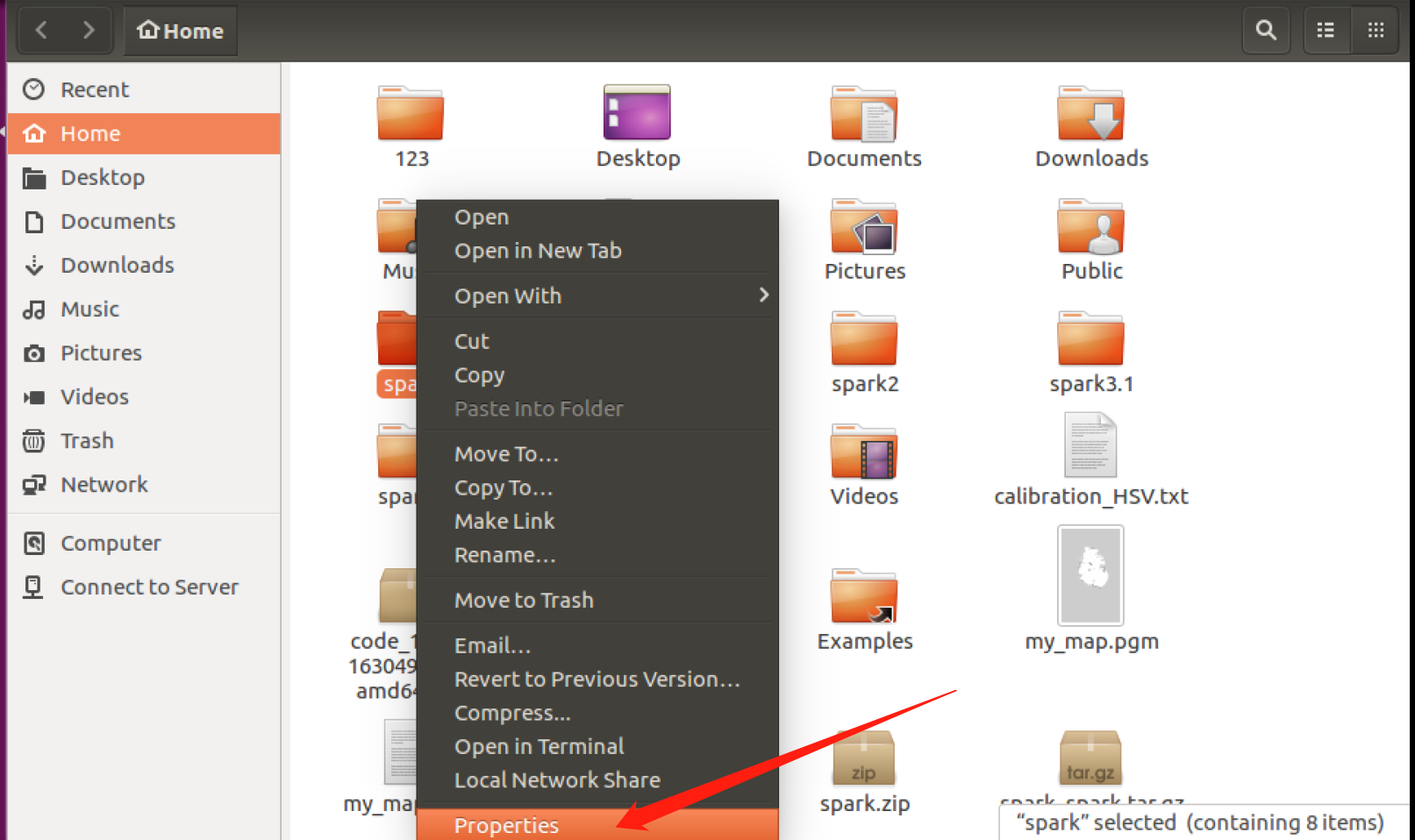
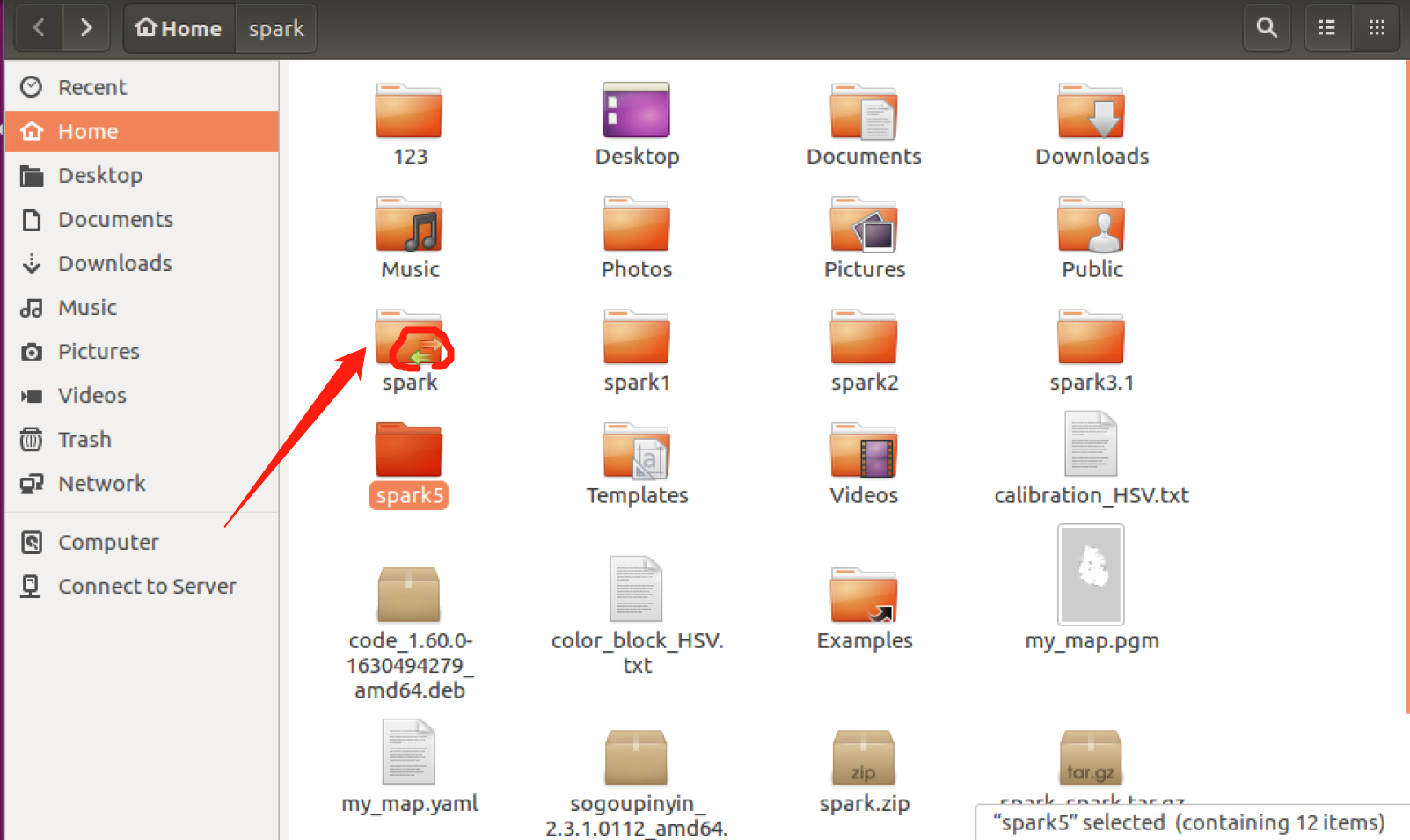
首先,打开home目录,看到很多文件夹,此处以共享图中的spark文件夹为例,右键点击spark文件夹,选择Properties选项
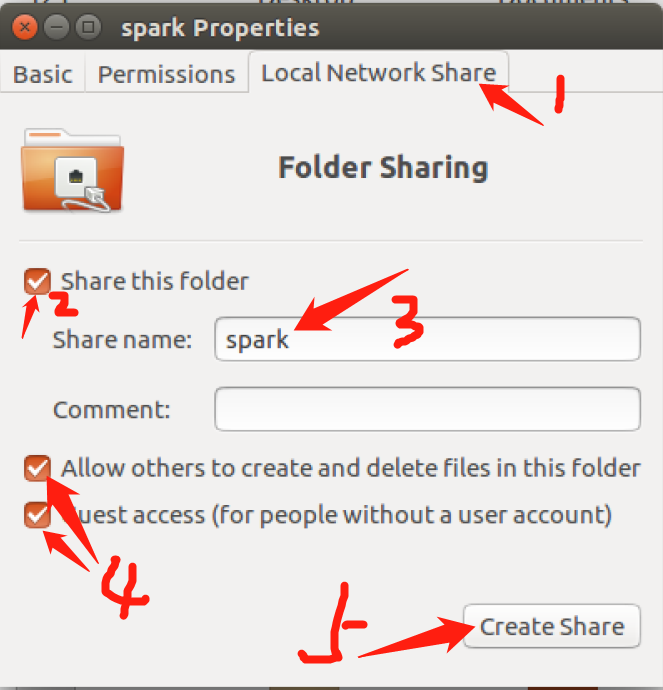
然后,在弹出的对话框中,依次点击 “Local Network Share”,选中 “Share this folder”,设置 “Share name"并记住所设置的名称,选中 ”Allow others to create and delete files in this folder" 和 “Guest access(for people without a user account”,点击 “Create Share”,注意此处我设置的名称不是图中的spark,而是myspark
文件夹共享成功后,原文件夹的图标会改变
3.在PC端的此电脑中,实现映射网络驱动器
首先,将VNC软件最小化,右键点击此电脑,选择 “映射网络驱动器” 选项卡
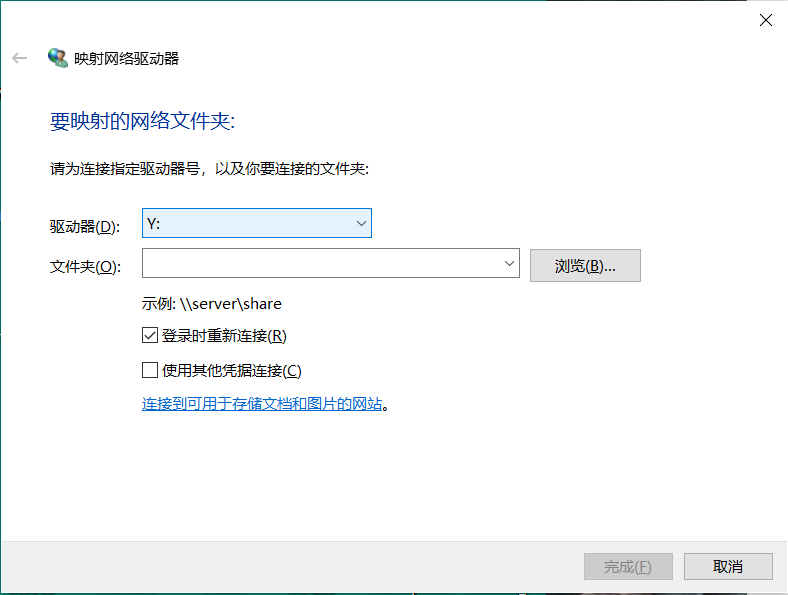
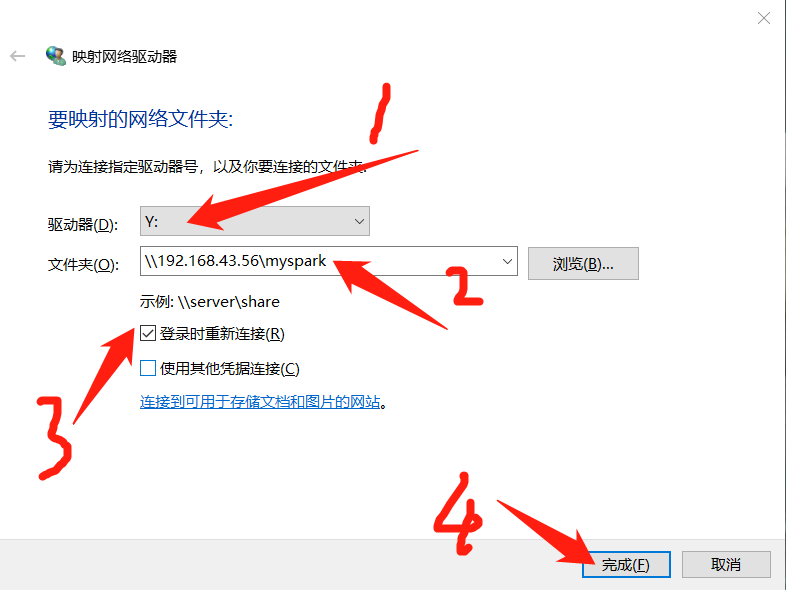
然后,任意命名驱动器,按照 \\server\share 的格式命名文件夹(其中server与刚刚在VNC输入的服务器地址相同,share即在VNC中创建的共享文件夹的名称),并选中下方的 ”登录时重新连接“,最后点击 ”完成“
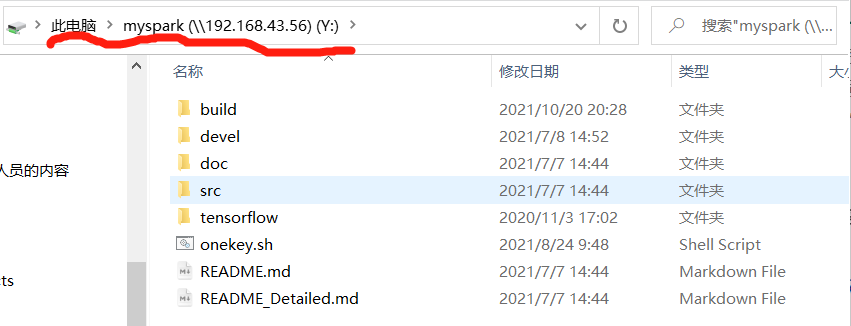
此时,PC端与机器人端通过 共享文件 和 映射网络驱动器 成功建立远程连接,可以在PC端使用多种开发工具如Visual Studio、Pycharm,直接修改机器人端的代码、共享文件夹文件结构等,而不需要在缺乏开发工具的机器人端安装系列开发工具,更不需要在搭载ubuntu系统的机器人端使用落后的开发工具如gedit、记事本
总结:PC端与机器人端通过共享文件和映射网络驱动器建立远程连接的操作确实非常实用,它不仅本身操作简单,而且能够大幅提高开发效率,真心不错!

















 1006
1006

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









