



 本文介绍了一种新的PID++算法,它基于实时位置输入,实现动态、自适应的运动控制,适用于各种应用场景。算法无需大量内存,可在微控制器上轻松实现,具有人性化特征。文中还展示了运行结果和Matlab代码示例。
本文介绍了一种新的PID++算法,它基于实时位置输入,实现动态、自适应的运动控制,适用于各种应用场景。算法无需大量内存,可在微控制器上轻松实现,具有人性化特征。文中还展示了运行结果和Matlab代码示例。
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录

💥1 概述
文献来源:
摘要:目前,机器人运动控制算法充其量是繁琐的实现,缺乏自动情境适应性,并且本质上是静态的。人形(类人)控制只不过是一个梦想,对所有人来说,但最快的计算机。本文提出的主要工作思想是定义一种全新的、简单的、计算轻量级的人形运动控制方法。本文提出了一种新的比例-积分-微分(PID)控制器算法,称为PID++,该算法基于实时编码器位置输入,使用基本算术进行微小调整,以实现稳定、精确、可控、动态、自适应的控制系统,用于线性运动控制,无论负载如何。在最初未指定PID系数的情况下,所提出的PID++算法动态调整和更新PID系数KP,K和Kd周期性地。不需要存储值数据库,因为在计算中仅使用具有准确时基的感测位置的当前值和先前值,并在每个读取间隔中覆盖,因此无需部署大量内存来存储和使用向量或矩阵。该算法的实现完成,设计上真正动态和自适应,工程师将能够在商业、工业、生物医学和太空应用中使用该算法。运动控制具有明确无误的人性化特征,甚至可以使用单个命令在最小的微控制器 (MCU) 上实现,而无需重新编程或重新配置。
关键词:
详细文章讲解见第4部分。
📚2 运行结果
可视化:
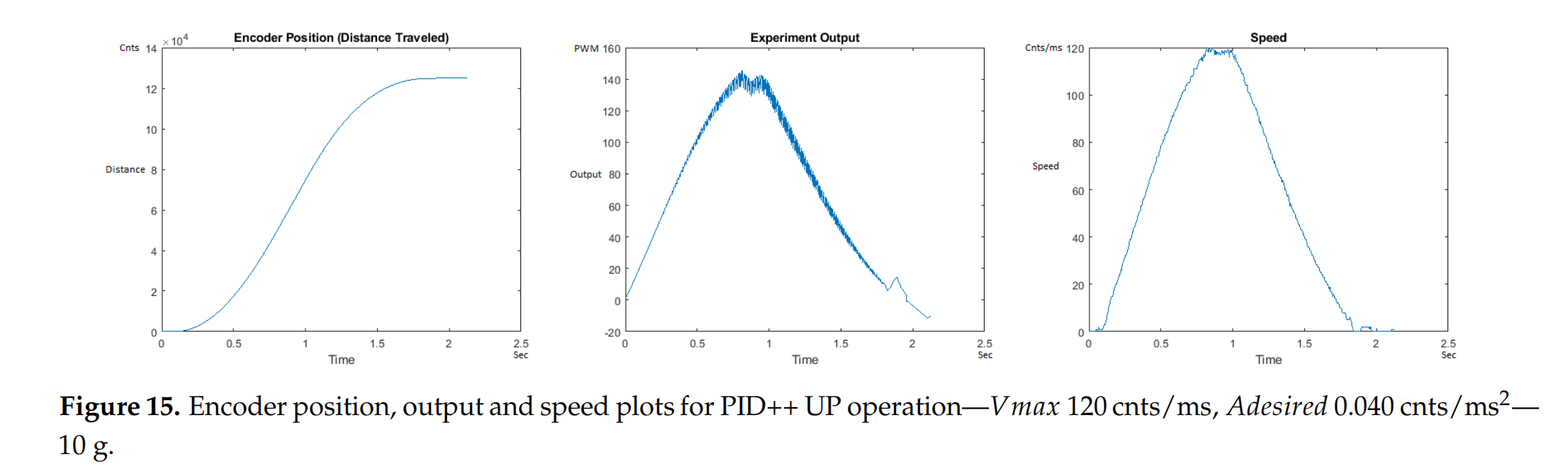
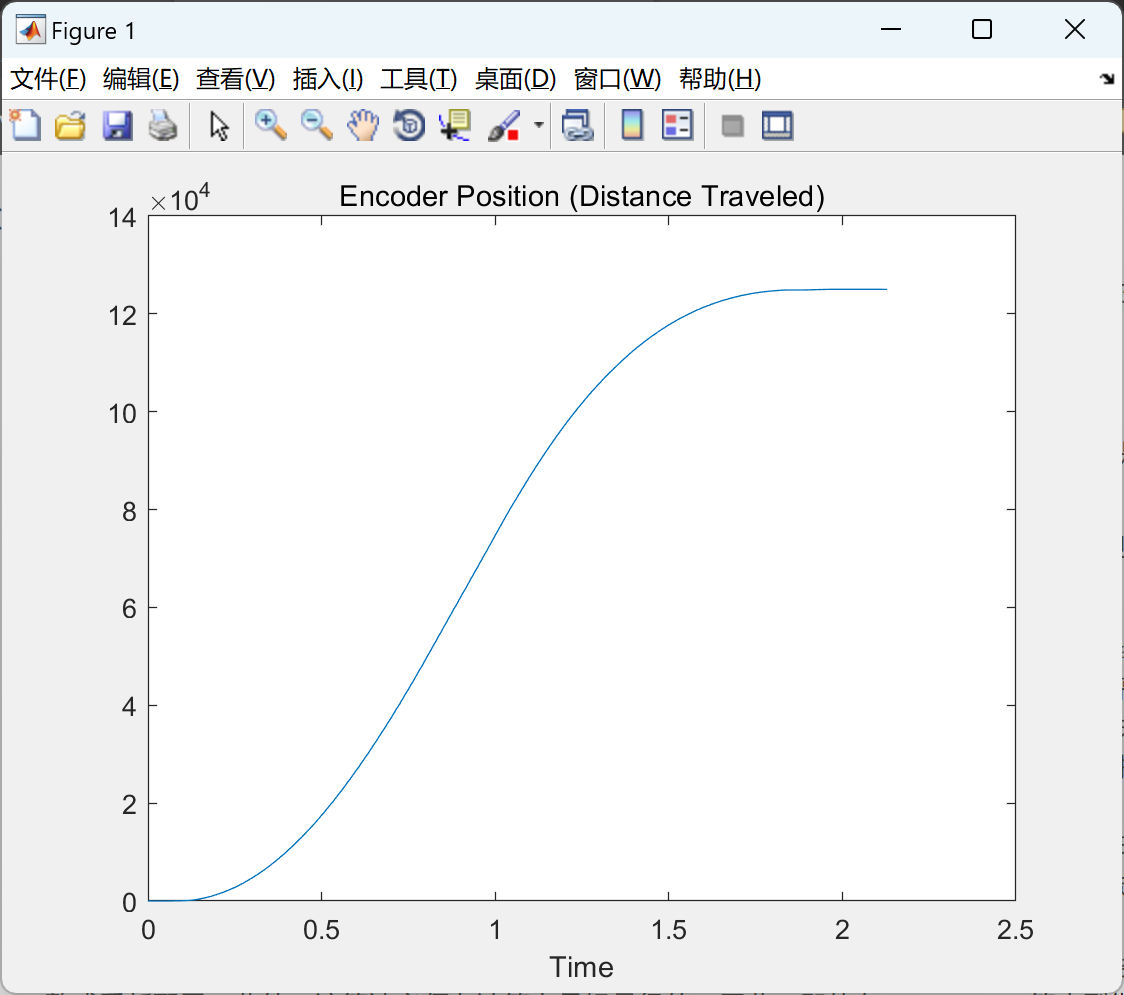
figure
plot(dt_sum, ReadEncoder);
xlabel('Time')
title('Encoder Position (Distance Traveled)')
saveas(gcf,'../results/DistanceTraveled.png')
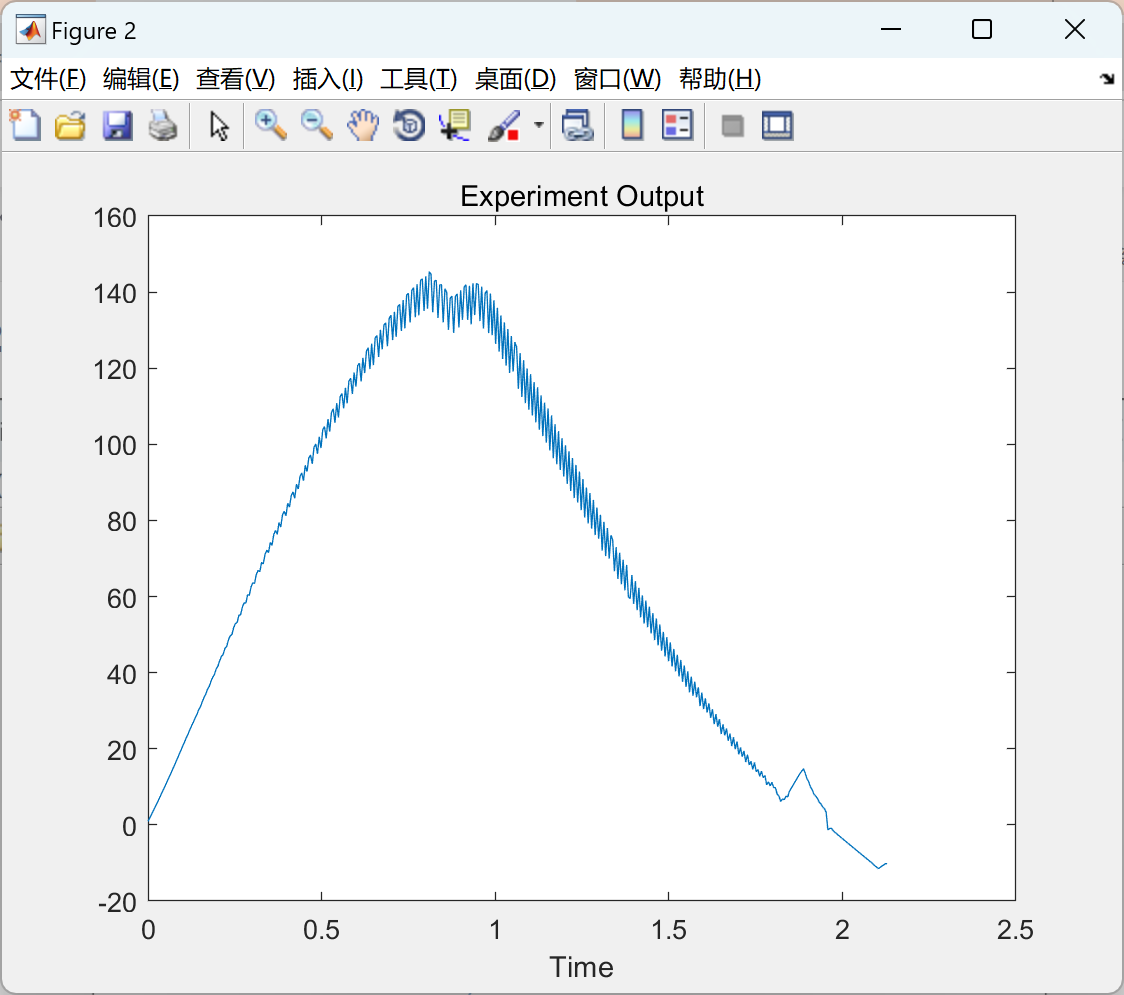
figure
plot(dt_sum, expOutput); % This is PID++ output from actual run on microcontroller
xlabel('Time')
title('Experiment Output')
saveas(gcf,'../results/ExpOut.png')
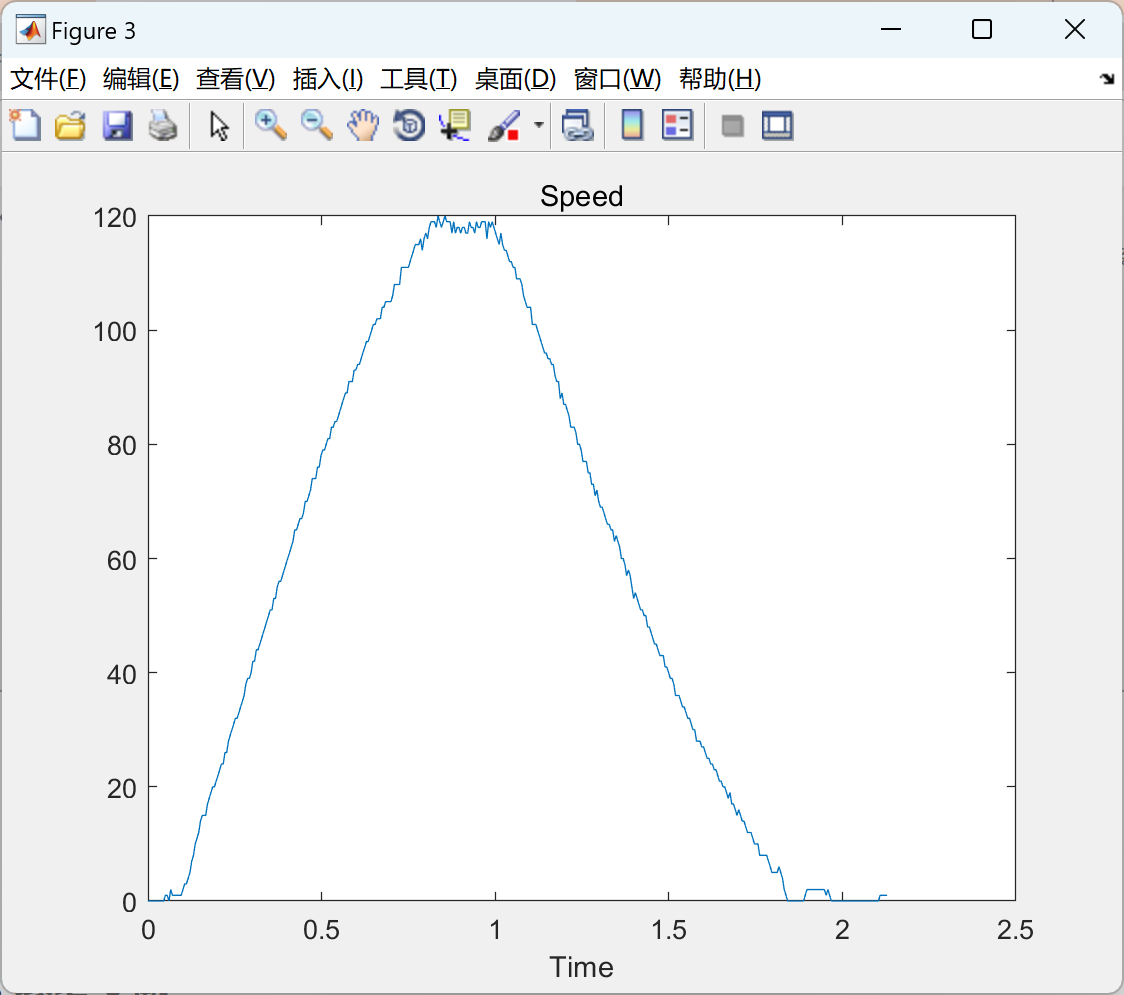
figure
plot(dt_sum, Velocity);
xlabel('Time')
title('Speed')
saveas(gcf,'../results/Speed.png')
%figure
%plot(dt_vec, output); % This is PID++ output from MATLAB simulation
%xlabel('Time')
%title('Controller Output')
%saveas(gcf,'../results/Out.png')
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。


















 1031
1031

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









