




 本文详细解析了几款知名品牌的扫地机器人自动回充技术,包括小米1T、iRobot、云鲸及360扫地机的设计特点与工作原理。通过对不同机型的测试与对比,揭示了自动回充技术的实现方式与创新之处。
本文详细解析了几款知名品牌的扫地机器人自动回充技术,包括小米1T、iRobot、云鲸及360扫地机的设计特点与工作原理。通过对不同机型的测试与对比,揭示了自动回充技术的实现方式与创新之处。
这篇文章想和大家分享一下其他扫地机的自动回充方式,包括iRobot、小米、云鲸、360。处于之前的博文关于自动回充的介绍比较多了,这里就分享一下这几款扫地机的自动回充方面的关键点及其设计的巧妙之处。下面我们一个一个来看。
1. 小米1T
小米的扫地机市场反响也是不错的,外观简约,主打黑白色,相继推出了1S/1C/1T,借着小米这个智能家居这个品牌和生态,销量在国内也是前五的。我们看看黑色1T这一款,也是比较新的1款,特色:顶部摄像头+前方TOF和单目。这里顺带提一下,自打苹果将TOF运用到手机端,扫地机也跟着蹭这一黑科技的亮点,当然也运用TOF技术解决了一些问题。下面请看图1

图1中,左侧是充电座,右侧为机身,外观轮廓和之前的1C区别不大,这款黑色1T的机身前侧装备了TOF和单目摄像头,赋能AI,官方宣传:ObstacleAI,翻译为人话就是智能避障。自动回充技术方面和1C几乎一模一样,都是红外引导加红外对准。为了探索其摄像头是否起到作用,我们把机身前侧的TOF和摄像头遮挡,留下前对准红外。对比遮挡情况下和正常情况下的自动回充区别。视频链接如下:
遮挡机身前方视频:扫地机小米1T遮挡机身TOF和摄像头回充视频
正常自动回充视频:扫地机小米1T无遮挡回充视频
通过视频明显可以看出,对比回充测试中,没有差别,从而可以知道小米1T的自动回充并没有用到摄像头,基本是纯红外IR的引导和对准。
2. iRobot自动回充
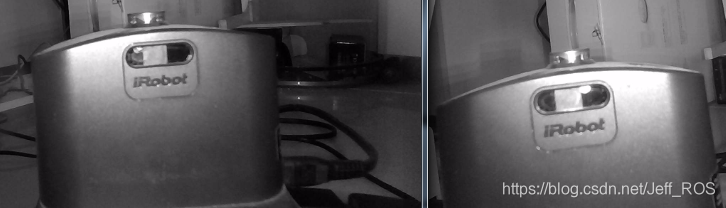
接着来看看国外品牌iRobot。iRobot这两年没有出什么特色的扫地机,可能是疫情的原因吧。这里就暂时不展开说了,等到出新机了在分享。下图2是充电座图,红外摄像头拍摄,图中白色亮点就是充电座上的对准红外发射器。其自动回充的原理和小米的是一样的,经过测试效果比不上小米1C,以博主测试的红外IR自动回充技术的扫地机来说,小米1C的做的比较好,其他有待加强。
3. 云鲸自动回充
这里不得不和小伙伴分享一下云鲸的扫地机,这个牌子的扫地机是一匹黑马,技术方案和其他家的不同,外观块头也比较特别。迫不及待先上一张图3。伙伴们觉得怎么样,很醒目吧,图中左侧是充电座,右侧是机身,充电座比机身大3倍左右,一个大块头。感觉花几千块买这么大的东东回家,是不是不吃亏。不过家小的就不方便了,充电座的入口有点仓门的样子,感觉扫地机要回家一样,没错是这样的。机身的激光传感器安装在后上方,大部分扫地机的激光传感器是安装在前上方或中上方。机身前方式充电触点,但不带红外。

关于其自动回充原理,博主经过了测试,发现扫地机必须先从机舱出发,也就是充电座开始出去之后才能回充,清扫过程也是要求先从机舱出发,这些人机交互通过大块头上的语音模块实现。基本原理是通过已知的路径引导回到充电座附近,再通过激光对准。聪明的小伙伴看到这里,是不是很纳闷,前面博客将的大部分激光扫地机都是激光引导、红外对准,而云鲸却是已知路径引导、激光对准。那激光是怎么对准的?一开始博主也没想明白。直到拍到一张图4,这里贴出来。
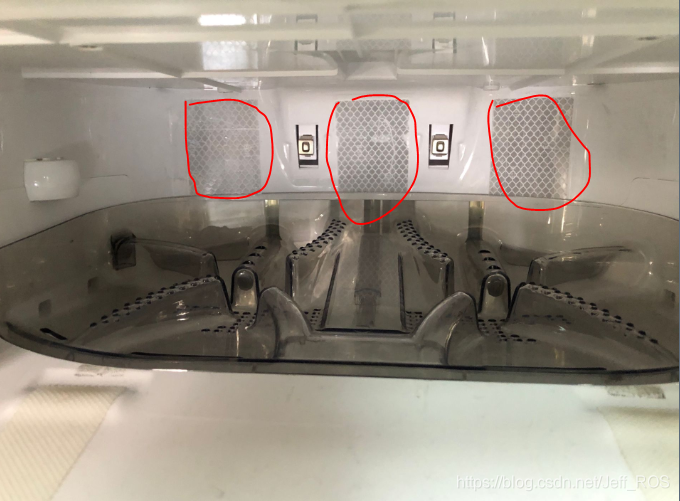
伙伴们看到图4中红色标出来的部分。云鲸利用激光打在这三个条纹上,反射回激光接收器上的不同信号来识别充电座和对准充电座触点。这倒是很新颖,博主测试了回充效果也不错。其 顺便说一下,其清扫拖布是旋转的,这也是特别之处。
4. 360扫地机自动回充
360扫地机?伙伴们听到360首先想到的是电脑的杀毒软件/电脑管家360,没错就是他,也出了扫地机,同样自动回充很别致,伙伴们一起看看360的充电座图5。

图5中,充电座上银白色长条就是充电触点,长条中间是红外对准,且只有一个IR。博主没有记录测试视频,这里直接分享测试结论。360通过红外引导至充电座附近,结合激光测距和红外对准的方法实现自动回充。红外对准发射器只有1个,和其他扫地机2个的不同。怎么回事,而且博主测试发现其回充率非常高,其设计别具一格。
5. 总结
扫地机自动回充的探索解密基本就到这里了,博主后续会继续跟踪扫地机的一些技术进展,包括但不仅限于自动回充、路径规划、定位、避障、智能识别等。就自动回充而言,难点在于对准部分,对准设计和算法没问题了,自动回充的成功率的得到了保障。欢迎各路大神交流指正!!!


















 1万+
1万+




 到【灌水乐园】发言
到【灌水乐园】发言









