




 文章详细介绍了3D结构光成像技术,包括其工作原理、系统组成和主要方法,如二进制编码和相移技术。这种技术通过投影和分析结构光模式在物体表面的变形来获取物体的三维信息。二进制编码提供可靠性,而灰度码和相移技术则能提高分辨率和精度,适用于不同类型的3D成像应用场景。
文章详细介绍了3D结构光成像技术,包括其工作原理、系统组成和主要方法,如二进制编码和相移技术。这种技术通过投影和分析结构光模式在物体表面的变形来获取物体的三维信息。二进制编码提供可靠性,而灰度码和相移技术则能提高分辨率和精度,适用于不同类型的3D成像应用场景。
原创 | 文BFT机器人
3D表面成像的一种主要方法是基于“结构光”的使用
即使用专门设计的二维空间变化强度模式对场景进行主动照明
3D结构光的整个系统包含结构光投影设备、摄像机、图像采集和处理系统。其过程就是投影设备发射光线到被测物体上,摄像机拍摄在被测物体上形成的三维光图形,拍摄图像经采集处理系统处理后获得被测物体表面数据。
在这个系统中,当相机和投影设备相对位置一定时,投射在被测物体上的光线畸变程度取决于物体表面的深度,所以在拍摄图像中可以得到一张拥有深度的光线图像。
3D结构光的根本就是通过光学手段获取被拍摄物体的三维结构,再通过这一信息进行更深度的应用。
01
结构光技术
我们周围的物理世界是三维的,然而,传统的相机和成像传感器只能获取缺乏深度信息的二维图像。
这一基本限制极大地限制了我们感知和理解现实世界物体复杂性的能力。在过去的几十年里,由于各种细分市场的应用需求、高分辨率和高速电子成像传感器的进步以及不断提高的计算能力的推动,3D表面成像技术的研究、开发和商业化取得了巨大进步。
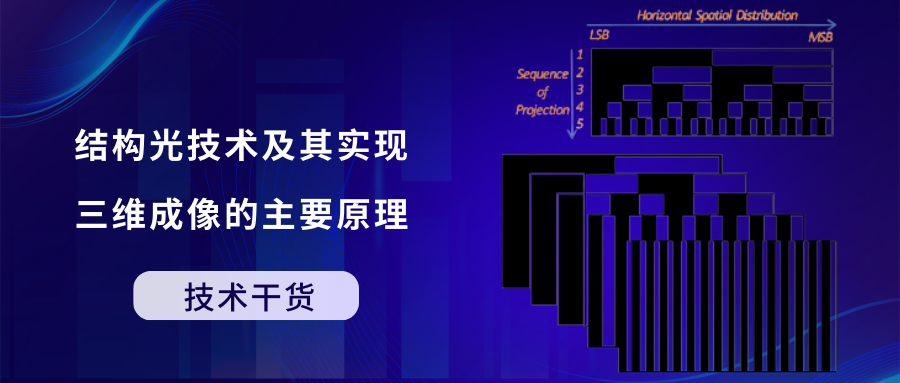
3D表面成像的一种主要方法是基于“结构光”的使用,即使用专门设计的二维空间变化强度模式对场景进行主动照明。如图1所示,一个空间变化的二维结构照明是由一个特殊的投影仪或由空间光调制器调制的光源产生的。结构光模式上每个像素的强度用数字信号,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 503
503

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









