









内容来源:
崔希璋, 於宗俦, 陶本藻,等. 广义测量平差(新版)[M]. 武汉测绘科技大学出版社, 2001.
贴在这里以备不时之需,自己抄一边,也就理解个七七八八了😜
文章目录
Part.I 预备知识
卡尔曼滤波是真的牛,跟着教材推导了一波,《广义测量平差》中是通过广义最小二乘原理来推导卡尔曼滤波方程的。别的教材还有通过最小方差估计来推导的,采用这些方法得到的结果是相同的。
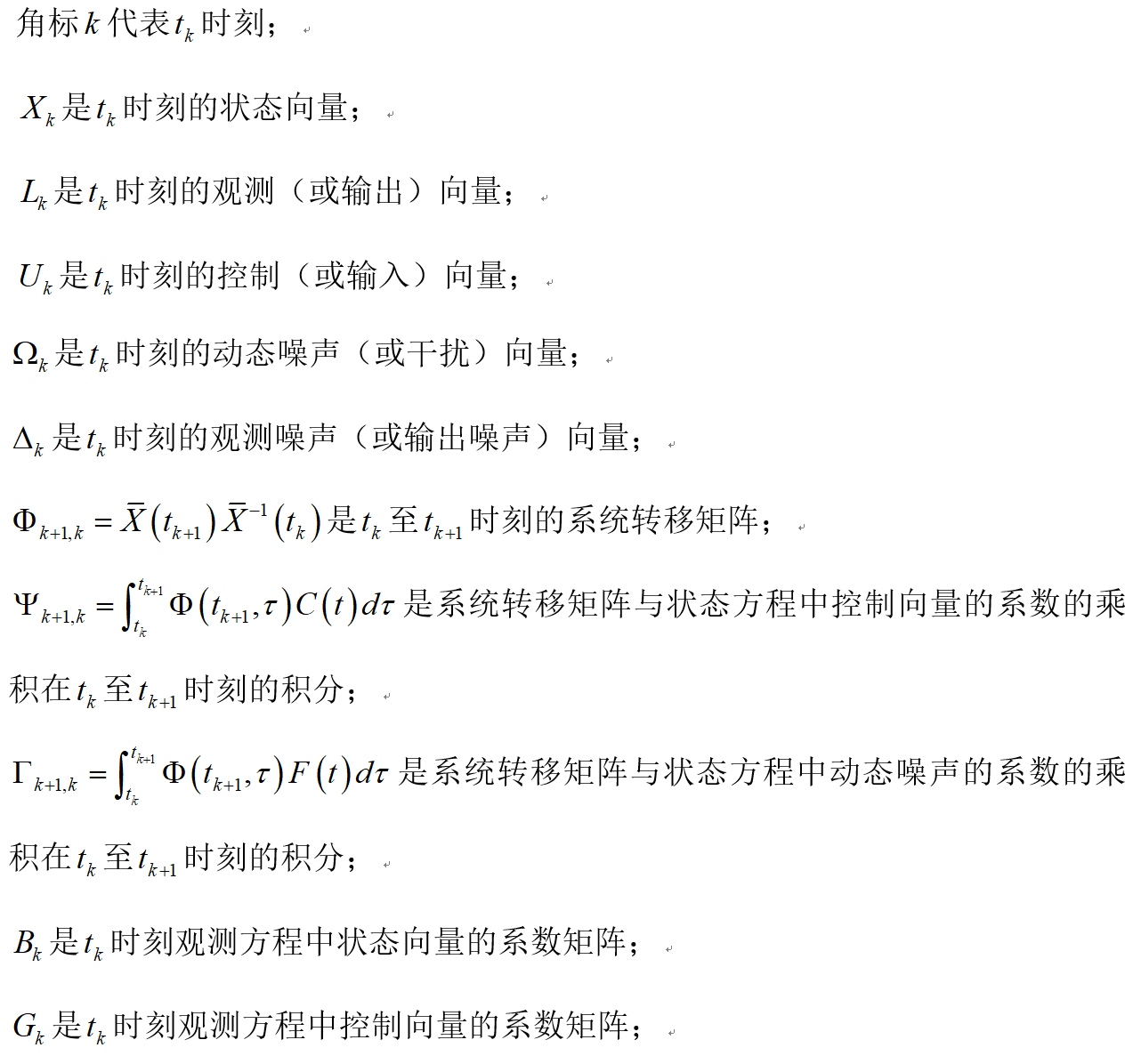
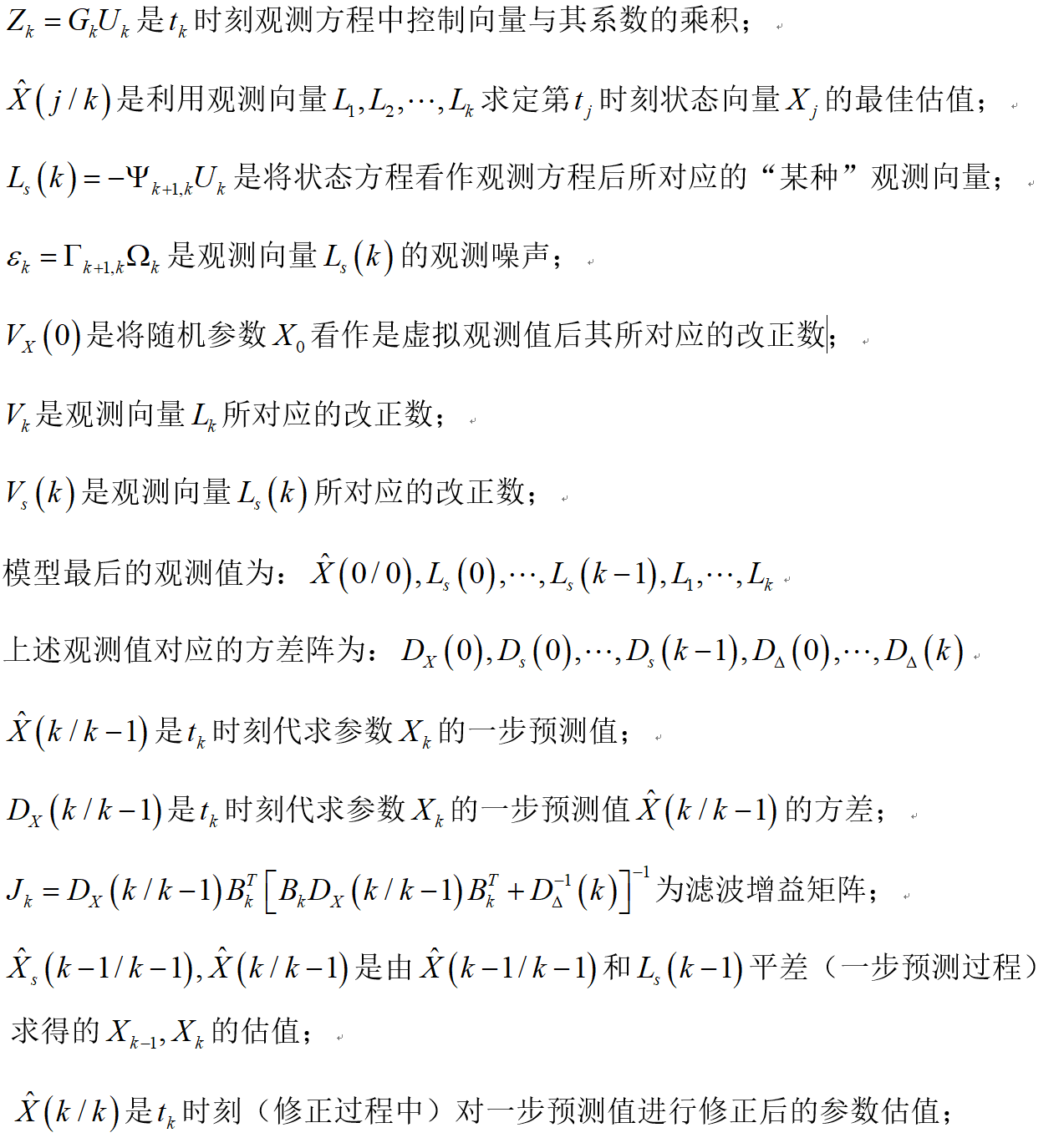
Chap.I 符号表示
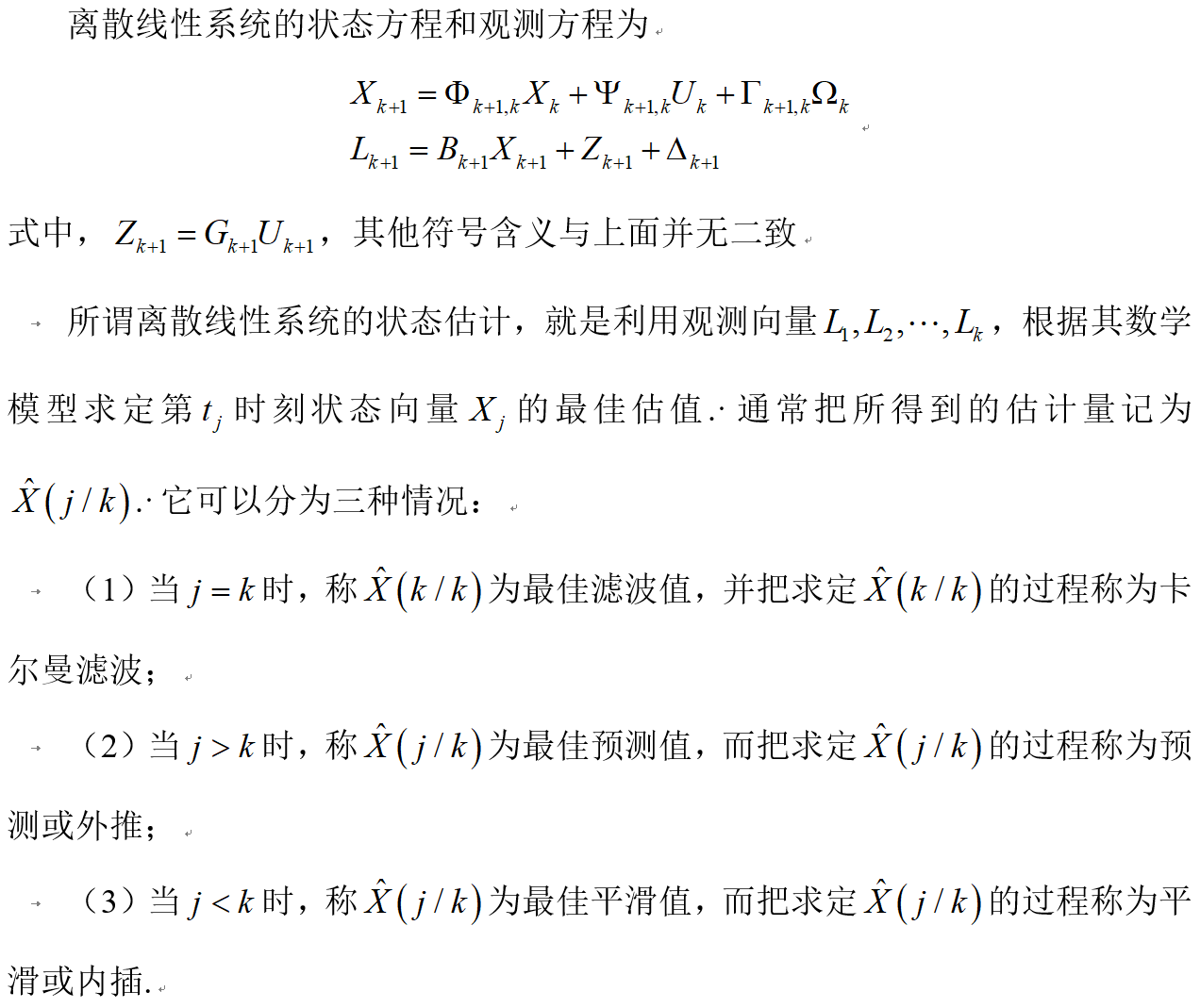
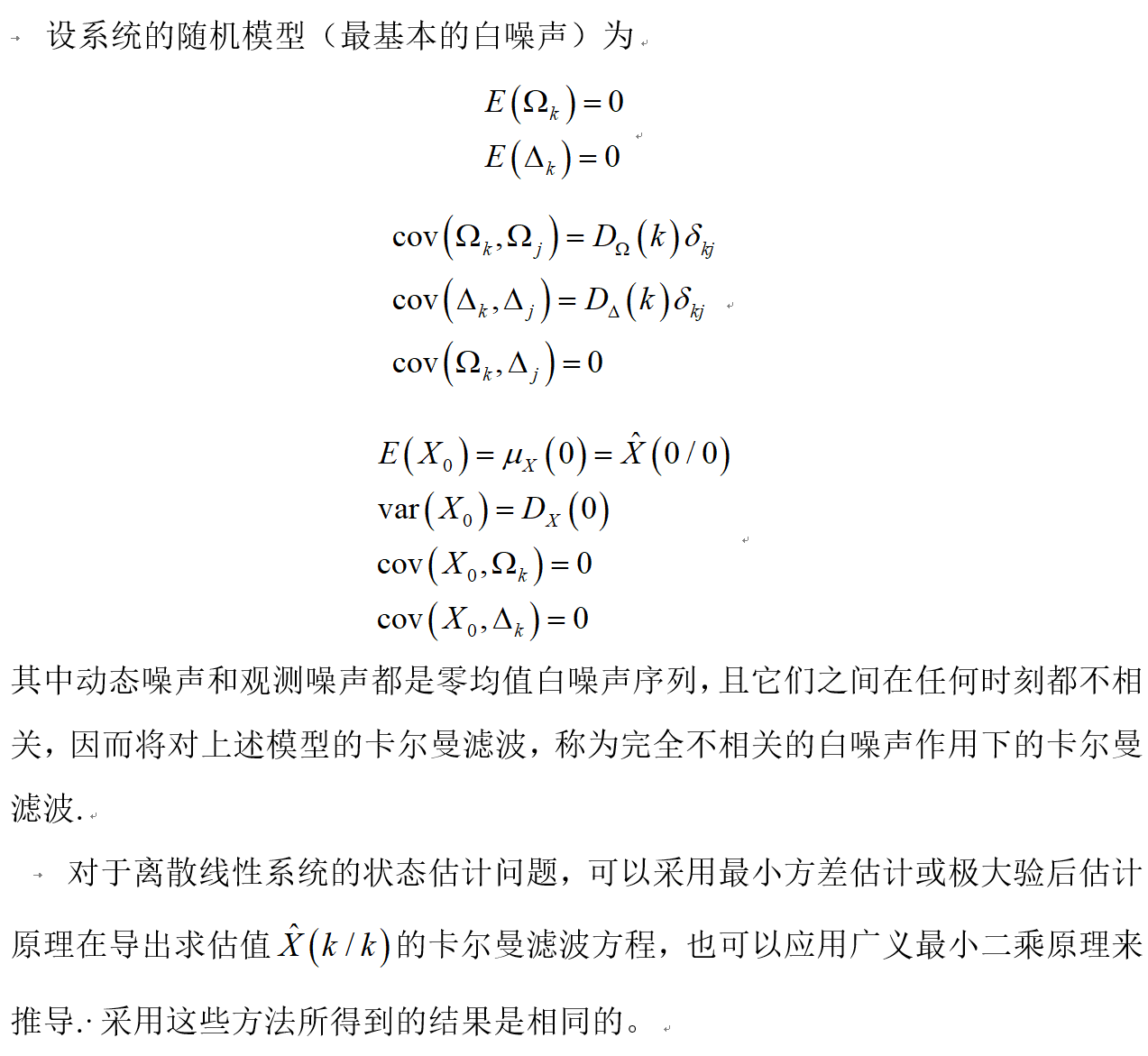
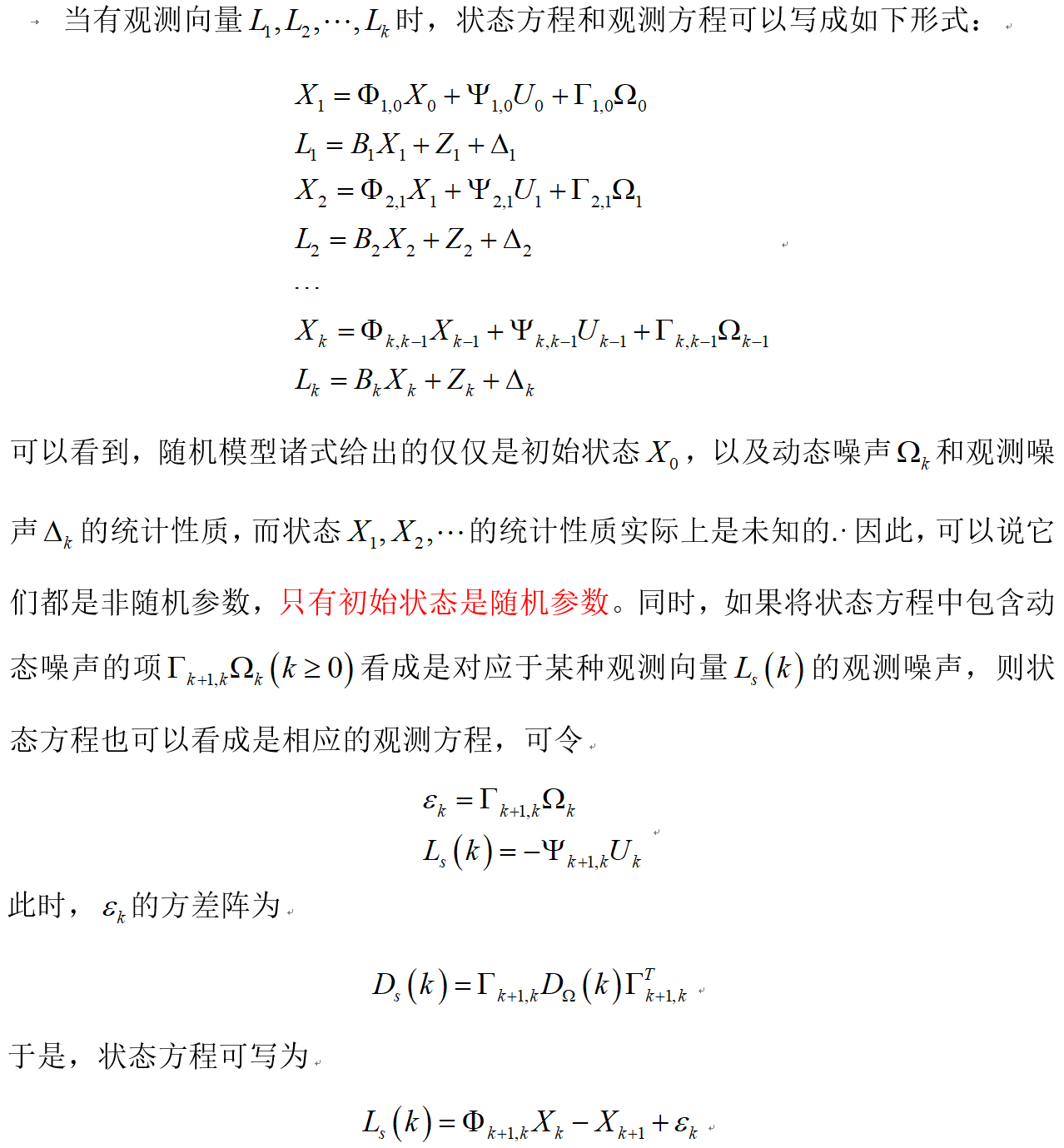
Chap.II 模型假设
Part.II 推导过程
下面采用最小二乘原理和逐次平差方法导出卡尔曼滤波的递推公式。
Chap.I 误差方程的表达
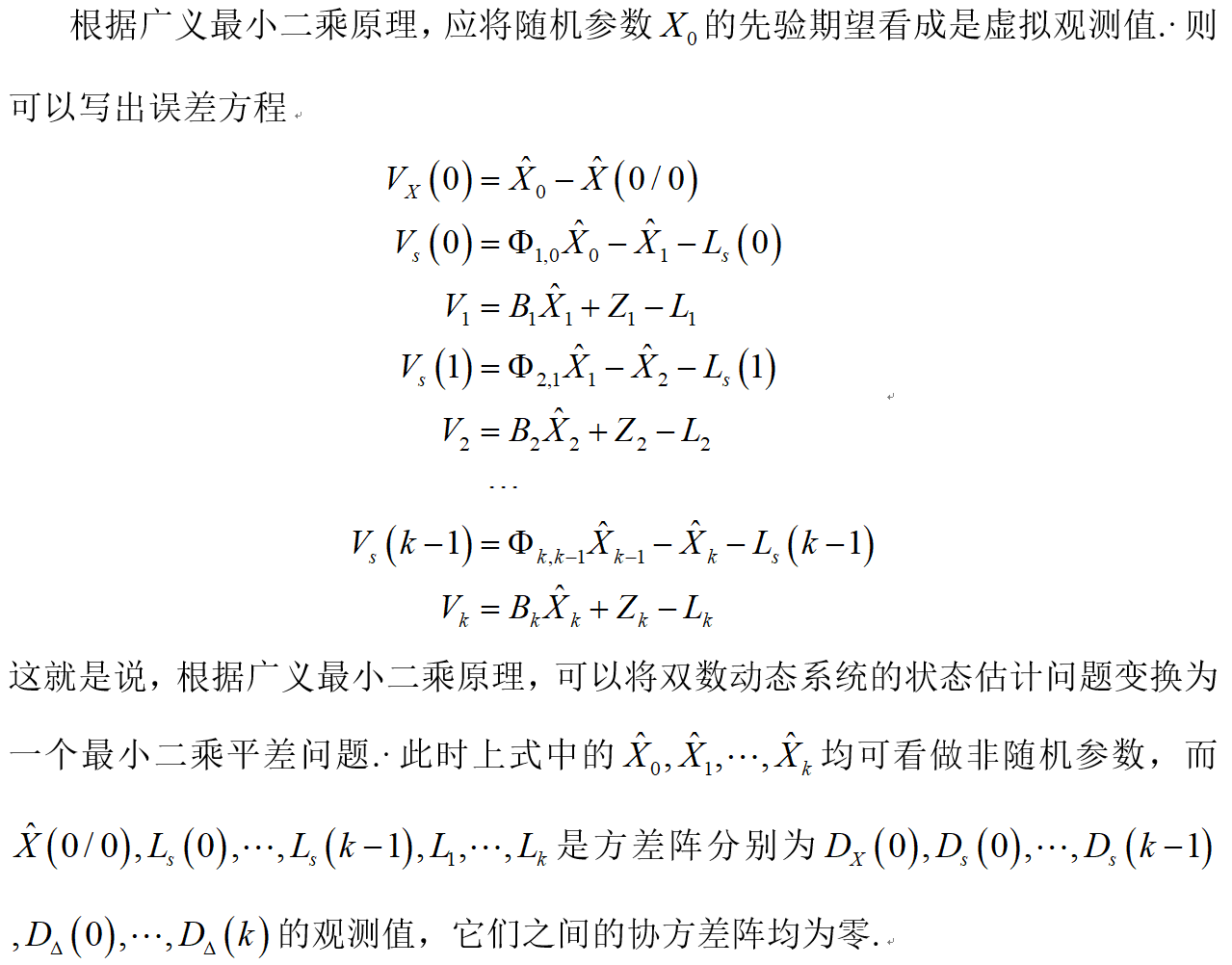
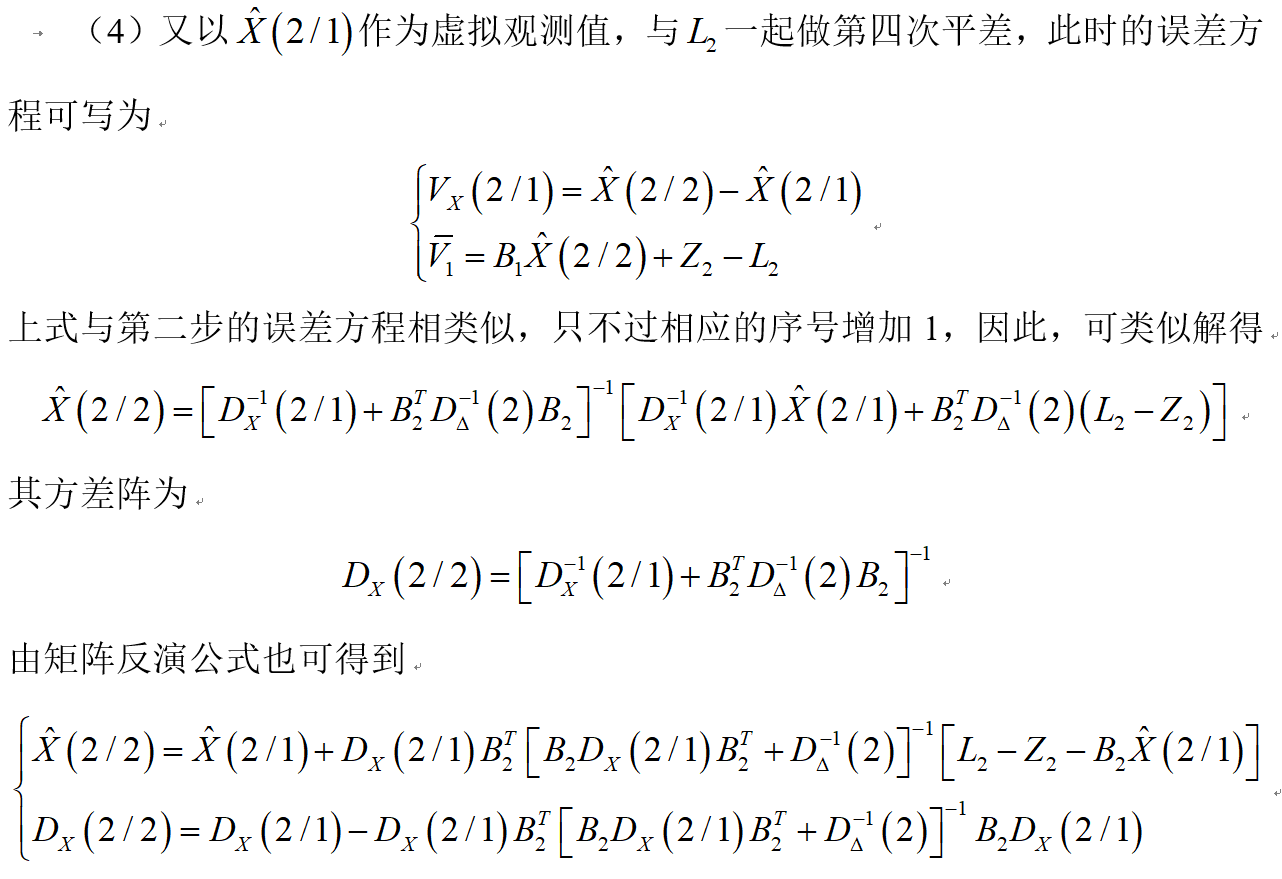
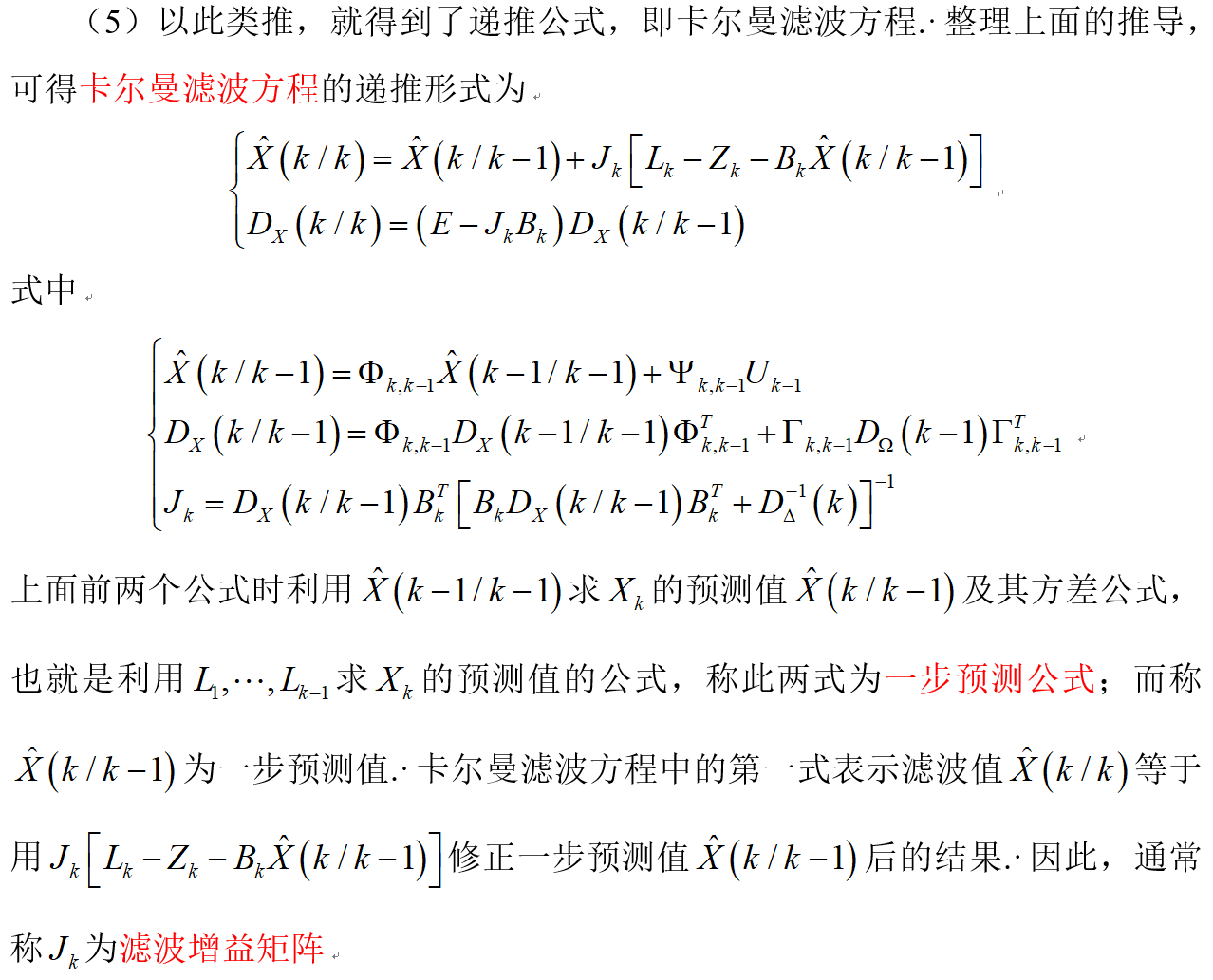
Chap.II 递推公式的导出
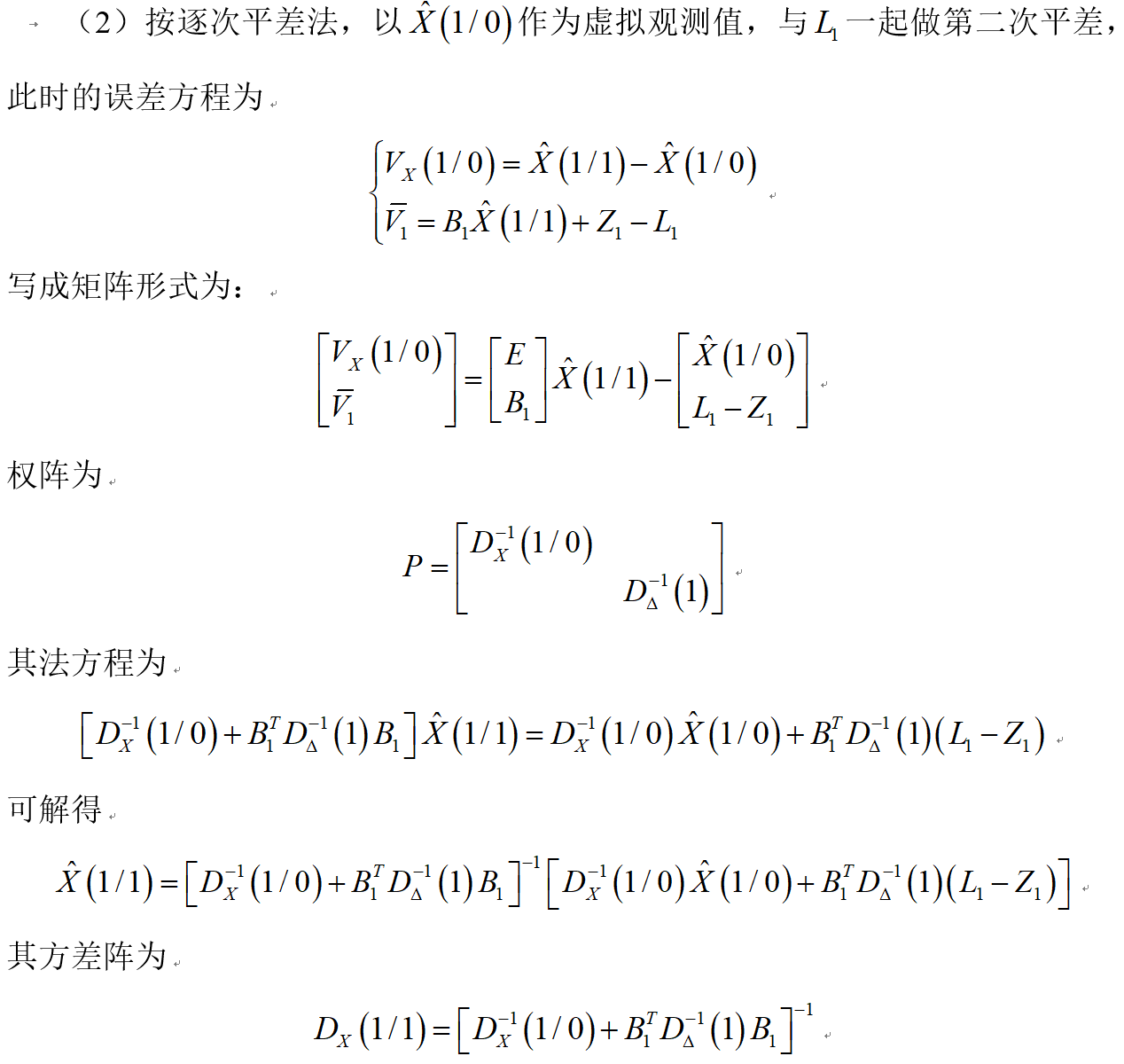
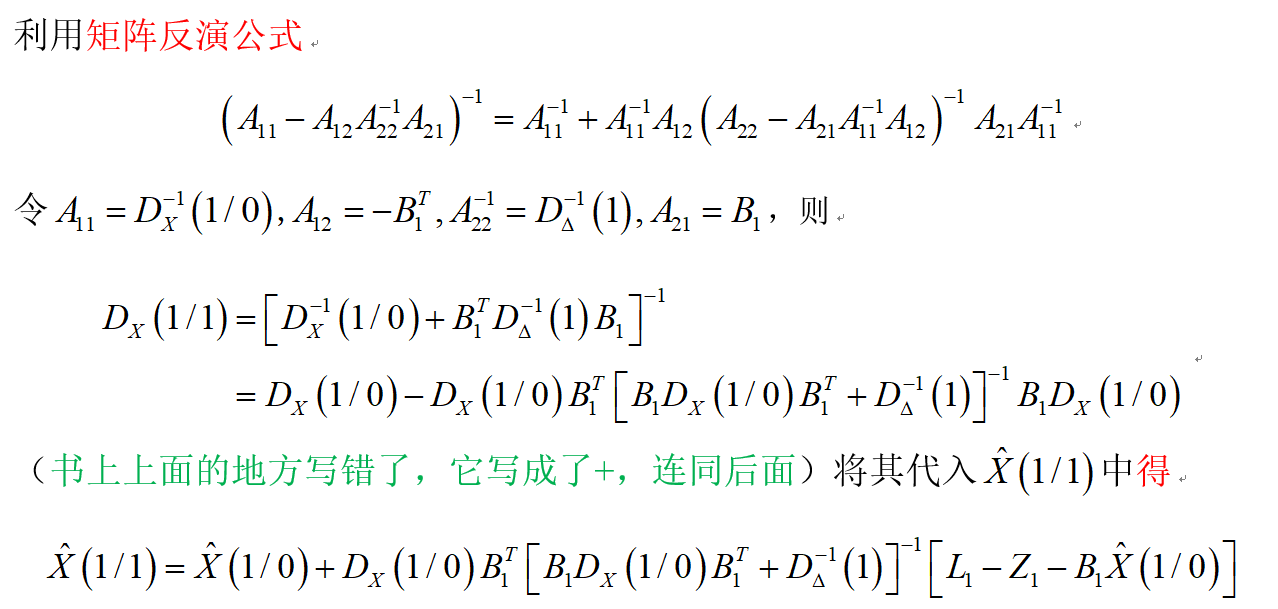
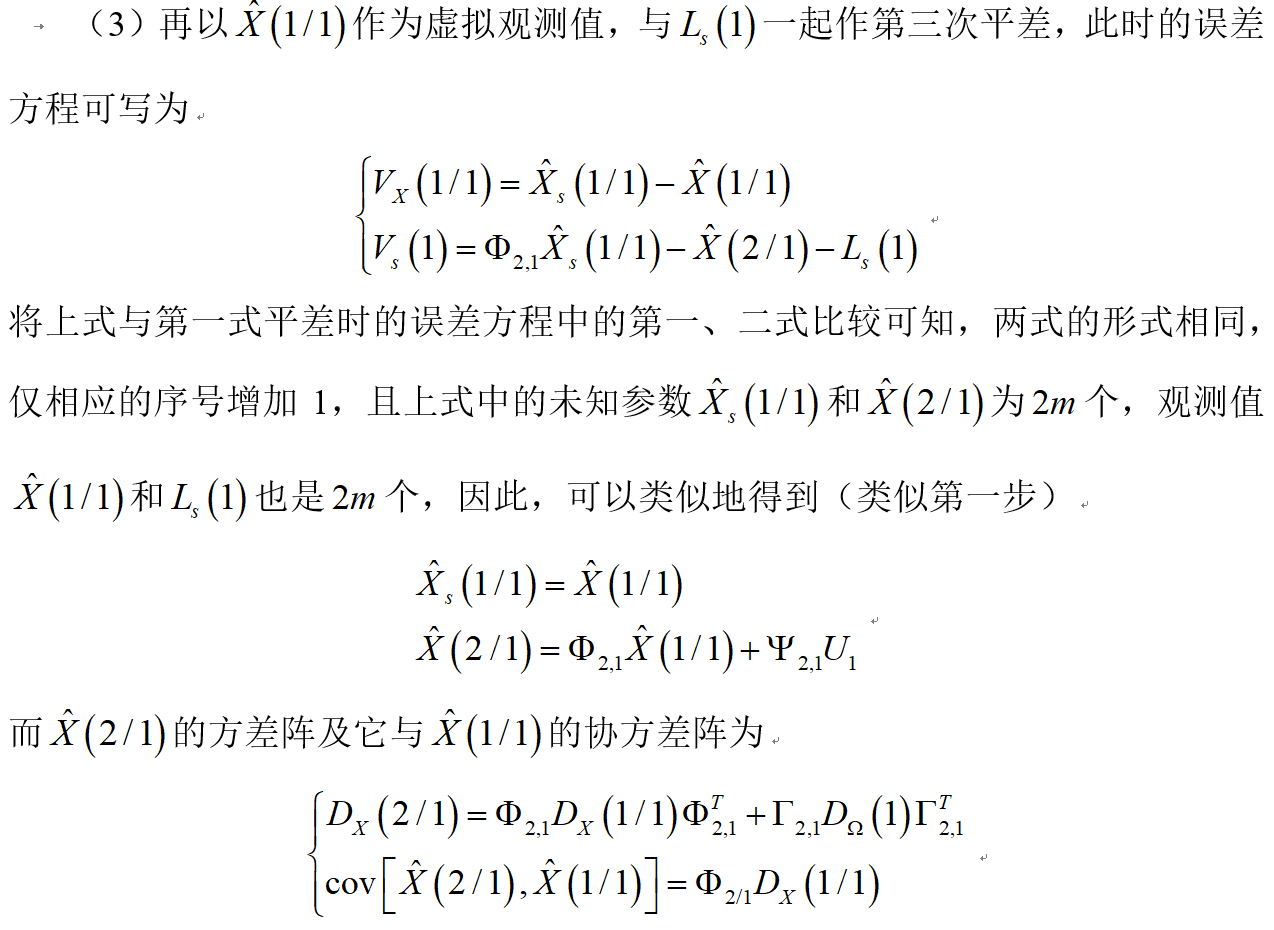
由于误差方程中包含的观测值很多,将它们放在一起进行整体平差很不方便。为此,可以采用逐次平差法进行计算,或者是按逐次平差法导出一组递推计算的公式来计算,这组公式称为卡尔曼滤波方程,其推导步骤如下:
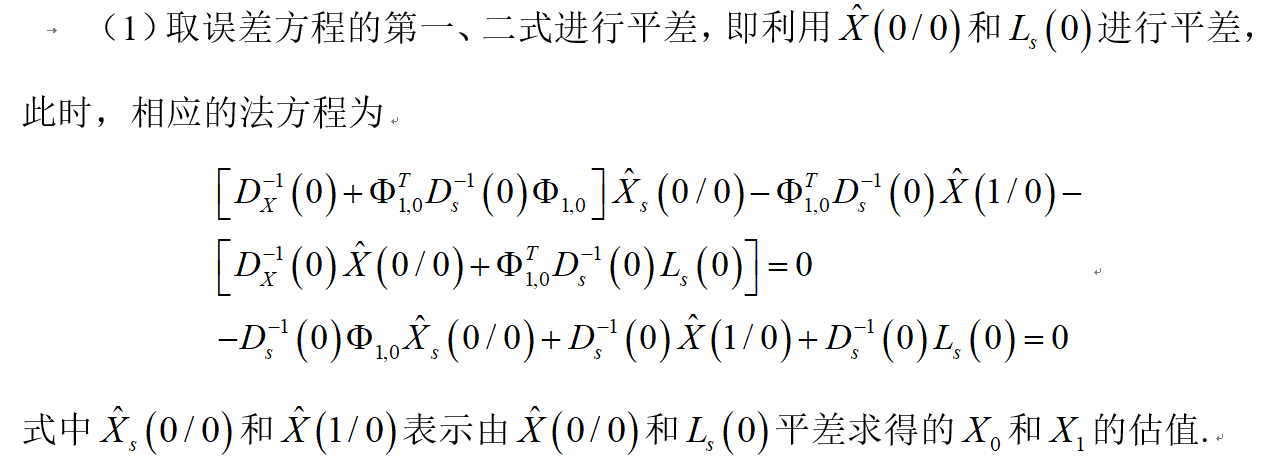
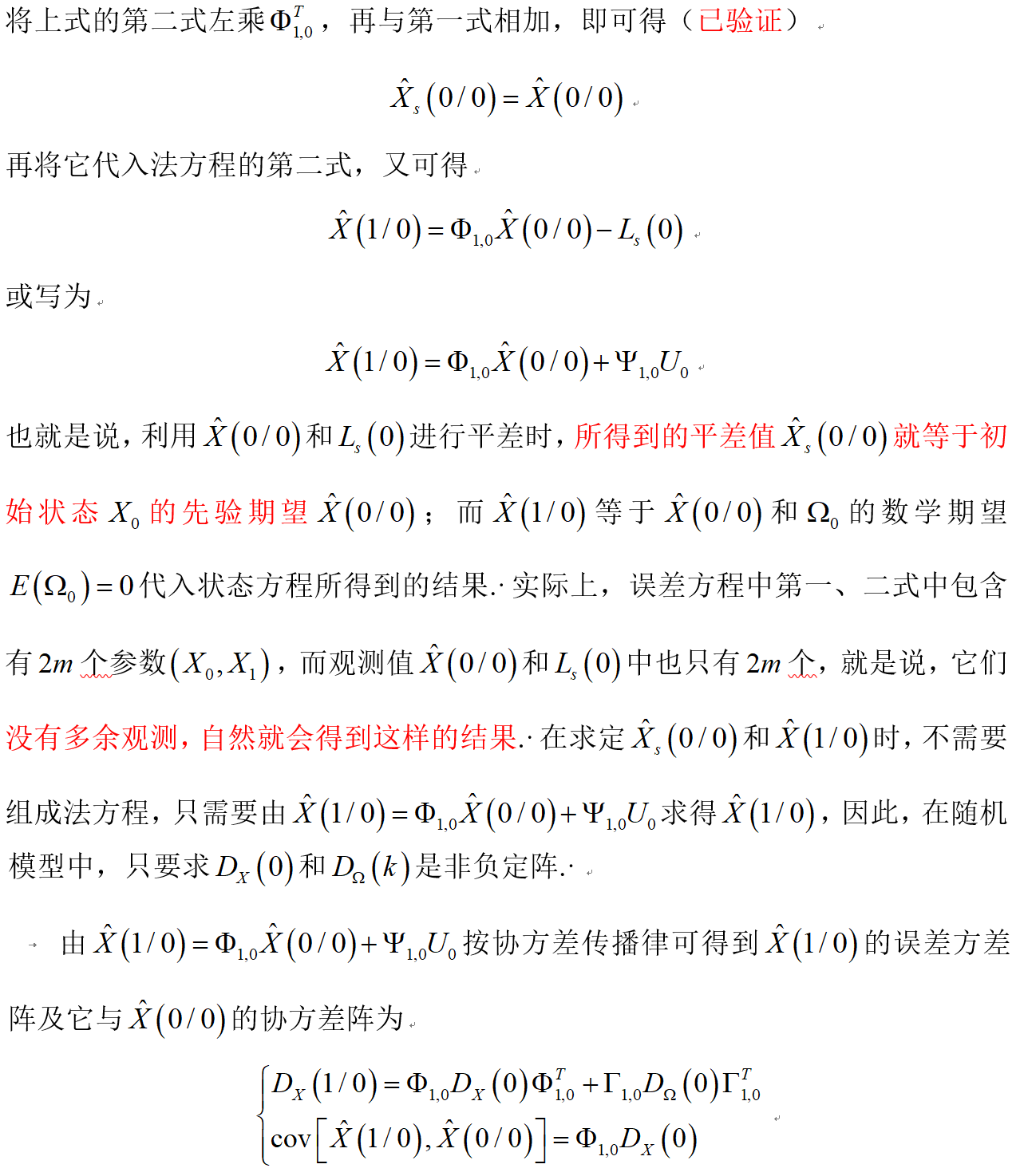
这是为什么呢?推导一下:
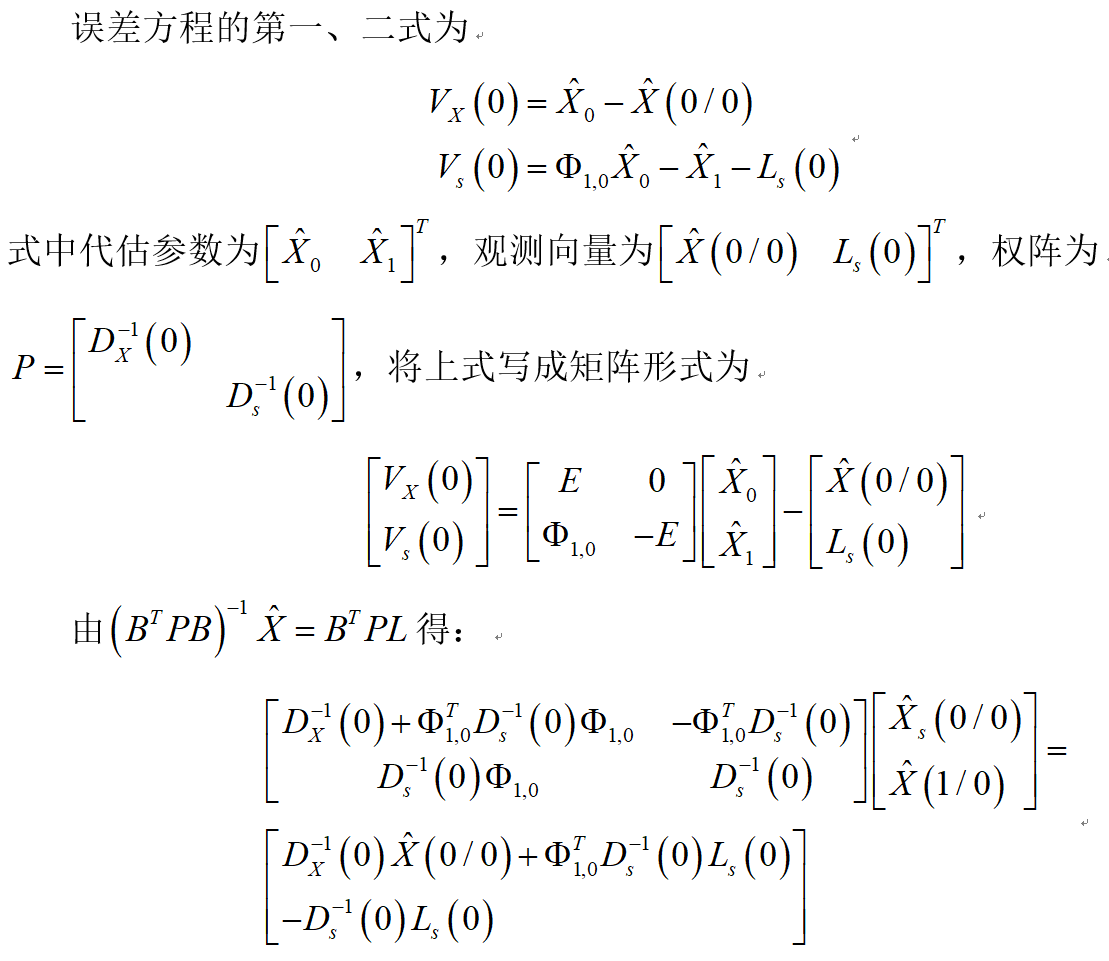
将此矩阵写成等式就是上面的两个等式!下面回到主线

Part.III 总结
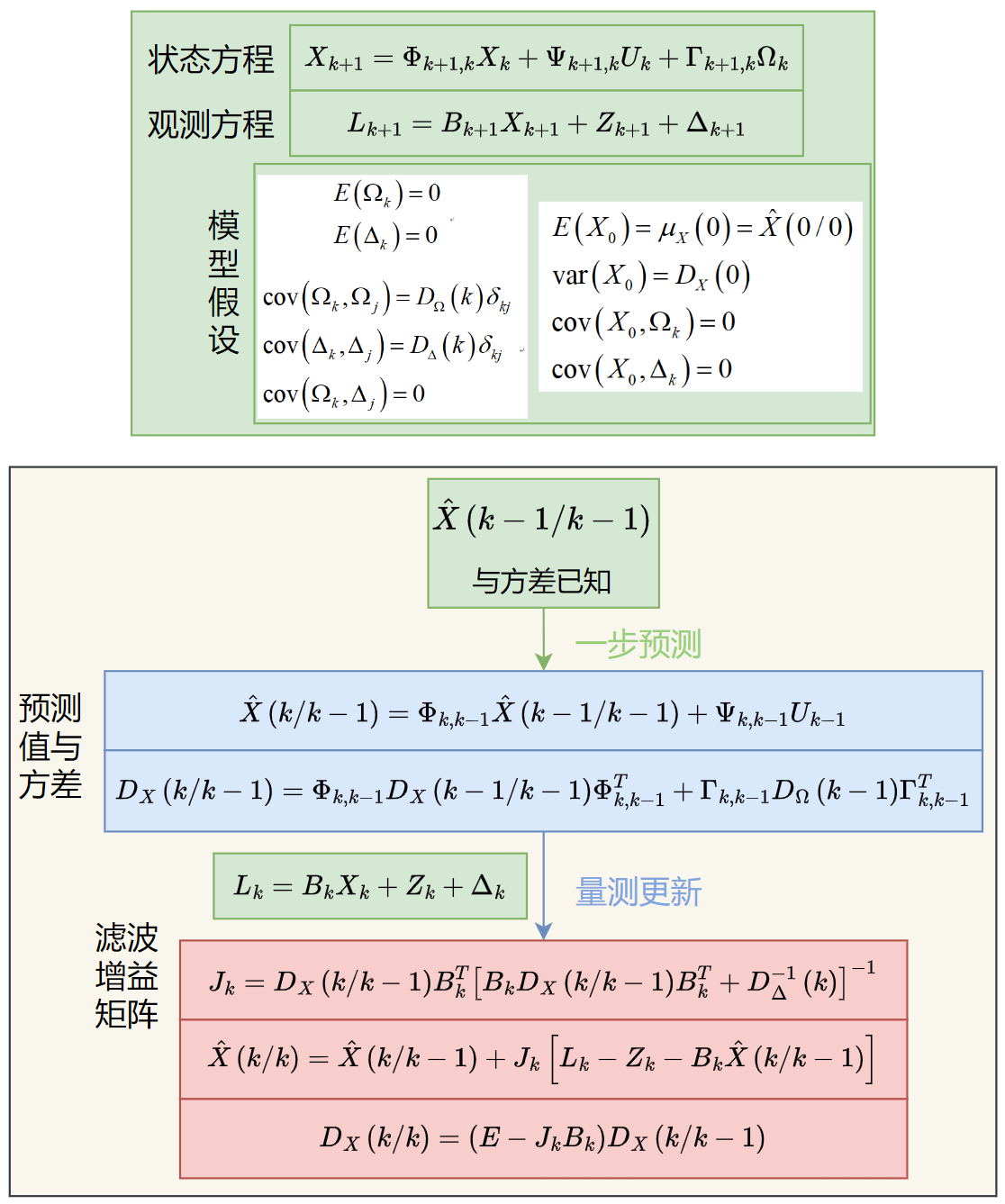
Chap.I 一图流
Chap.II 卡尔曼滤波的特点
卡尔曼滤波方程是一组递推计算公式,其计算过程是一个不断地预测、修正的过程。在求解时不需要存储大量的观测数据,并且当得到新的观测数据时,可随时估算得新的滤波值,便于实时处理观测结果。
卡尔曼滤波还具有以下特点:
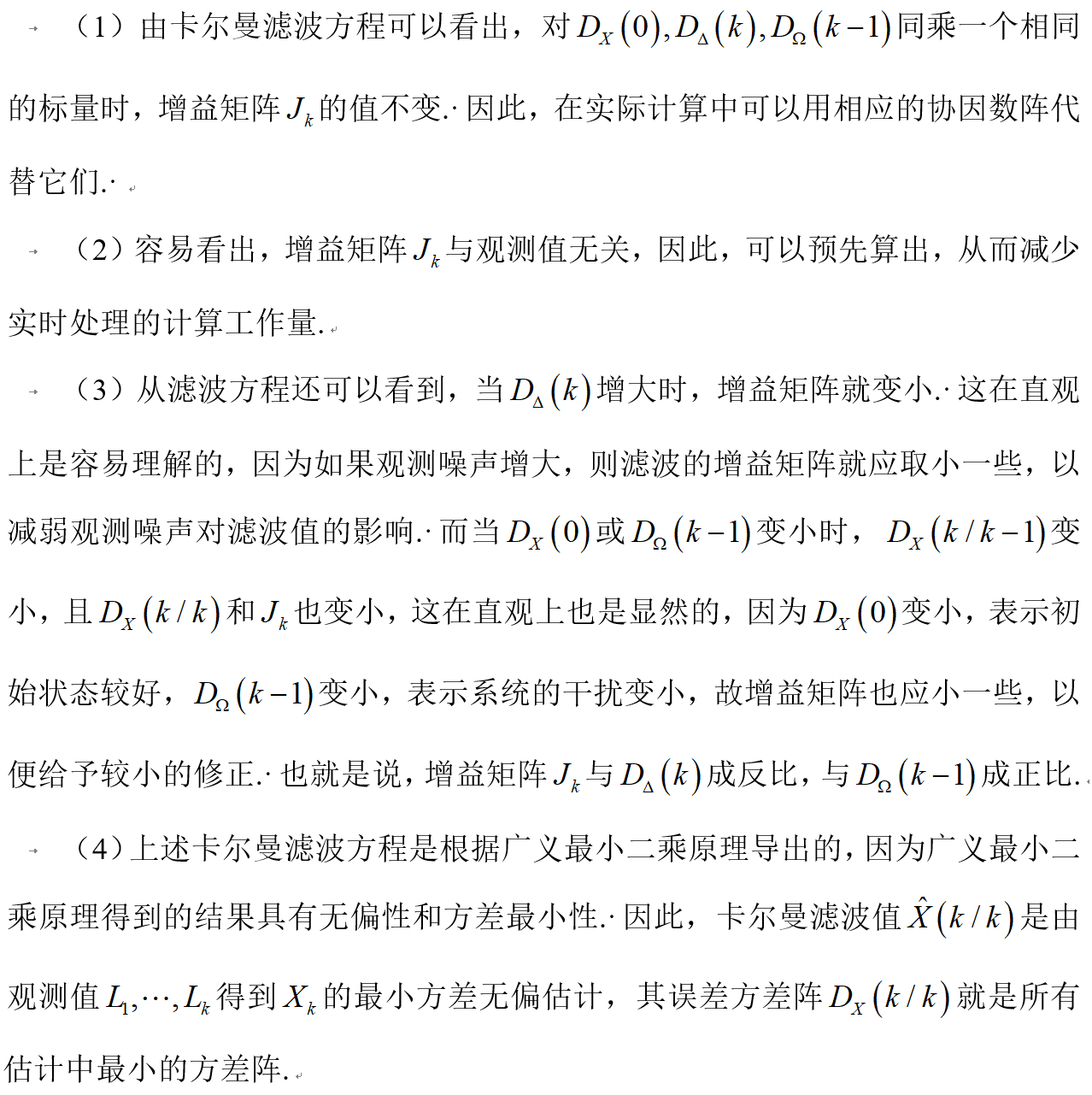
对这些这些特点的理解还不是很到位,所以以后需要在这上面多下点功夫。


















 5077
5077

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











