




在使用多线激光的时候需要总是会碰到点云数据,这里简单的接受一下点云数据,并堆数据结构进行分析,方便自己后期对点云特征数据进行处理。
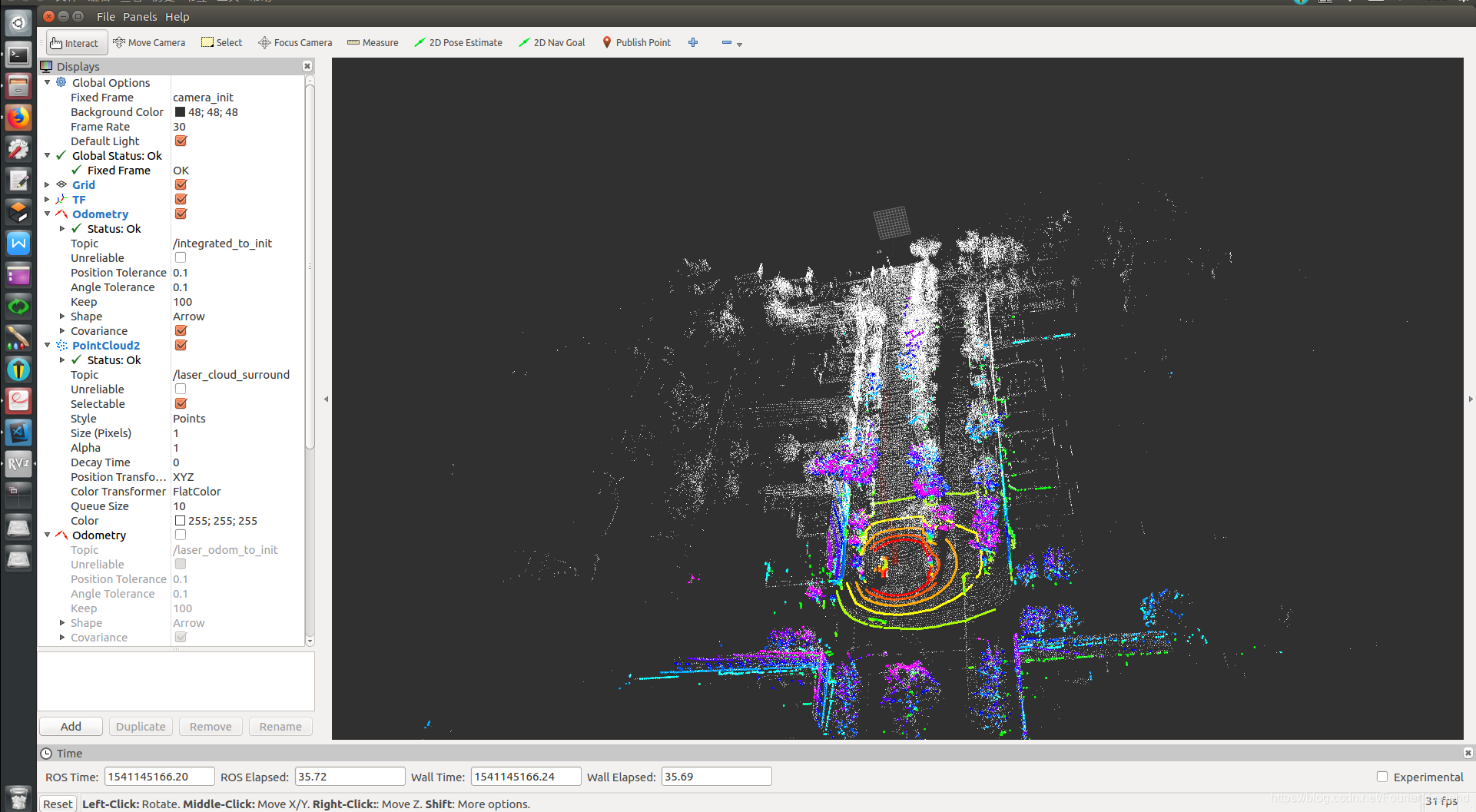
Rviz中的点云数据
本书据采用的经典的 loam_velodyne 算法,跑得是开源的包pcap 包, 有时间会详细介绍跑包的方法
点云数据结构分析
具体官方数据分析: http://docs.ros.org/jade/api/sensor_msgs/html/msg/PointCloud2.html
header: // 点云的头信息
seq: 963 //
stamp: // 时间戳
secs: 1541143772
nsecs: 912011000
frame_id: "/camera_init"
height: 1 // If the cloud is unordered, height is 1 如果cloud 是无序的 height 是 1
width: 852578 //点云的长度
fields: // sensor_msgs/PointField[] fields
-
name: "x"
offset: 0
dat 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 854
854

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









