







1、配置board.h的串口3
打开board.h文件,找到串口这一段,就是在这里增加串口3的配置,先看一下注释中的说明。
- 1、宏定义串口号
- 2、宏定义相对应的发送和接收引脚号
- 3、如果使用DMA,要在RT-Thread Settings里配置
- 4、根据串口号和发送接收定义DMA功能
所以我们配置串口3只需要第1、2步,新增在之前的串口1下方。
/*-------------------------- UART CONFIG BEGIN --------------------------*/
/** After configuring corresponding UART or UART DMA, you can use it.
*
* STEP 1, define macro define related to the serial port opening based on the serial port number
* such as #define BSP_USING_UART1
*
* STEP 2, according to the corresponding pin of serial port, define the related serial port information macro
* such as #define BSP_UART1_TX_PIN "PA9"
* #define BSP_UART1_RX_PIN "PA10"
*
* STEP 3, if you want using SERIAL DMA, you must open it in the RT-Thread Settings.
* RT-Thread Setting -> Components -> Device Drivers -> Serial Device Drivers -> Enable Serial DMA Mode
*
* STEP 4, according to serial port number to define serial port tx/rx DMA function in the board.h file
* such as #define BSP_UART1_RX_USING_DMA
*
*/
#define BSP_USING_UART1
#define BSP_UART1_TX_PIN "PA9"
#define BSP_UART1_RX_PIN "PA10"
#define BSP_USING_UART3
#define BSP_UART3_TX_PIN "PB10"
#define BSP_UART3_RX_PIN "PB11"
/*-------------------------- UART CONFIG END --------------------------*/
2、代码及运行结果
2.1、复制官方例程到main.c里
//#include <rtthread.h>
#define SAMPLE_UART_NAME "uart3"
/* 用于接收消息的信号量 */
static struct rt_semaphore rx_sem;
static rt_device_t serial;
/* 接收数据回调函数 */
static rt_err_t uart_input(rt_device_t dev, rt_size_t size)
{
/* 串口接收到数据后产生中断,调用此回调函数,然后发送接收信号量 */
rt_sem_release(&rx_sem);
return RT_EOK;
}
static void serial_thread_entry(void *parameter)
{
char ch;
while (1)
{
/* 从串口读取一个字节的数据,没有读取到则等待接收信号量 */
while (rt_device_read(serial, -1, &ch, 1) != 1)
{
/* 阻塞等待接收信号量,等到信号量后再次读取数据 */
rt_sem_take(&rx_sem, RT_WAITING_FOREVER);
}
/* 读取到的数据通过串口错位输出 */
ch = ch + 1;
rt_device_write(serial, 0, &ch, 1);
}
}
static int uart_sample(int argc, char *argv[])
{
rt_err_t ret = RT_EOK;
char uart_name[RT_NAME_MAX];
char str[] = "hello RT-Thread!\r\n";
if (argc == 2)
{
rt_strncpy(uart_name, argv[1], RT_NAME_MAX);
}
else
{
rt_strncpy(uart_name, SAMPLE_UART_NAME, RT_NAME_MAX);
}
/* 查找系统中的串口设备 */
serial = rt_device_find(uart_name);
if (!serial)
{
rt_kprintf("find %s failed!\n", uart_name);
return RT_ERROR;
}
/* 初始化信号量 */
rt_sem_init(&rx_sem, "rx_sem", 0, RT_IPC_FLAG_FIFO);
/* 以中断接收及轮询发送模式打开串口设备 */
rt_device_open(serial, RT_DEVICE_FLAG_INT_RX);
/* 设置接收回调函数 */
rt_device_set_rx_indicate(serial, uart_input);
/* 发送字符串 */
rt_device_write(serial, 0, str, (sizeof(str) - 1));
/* 创建 serial 线程 */
rt_thread_t thread = rt_thread_create("serial", serial_thread_entry, RT_NULL, 1024, 25, 10);
/* 创建成功则启动线程 */
if (thread != RT_NULL)
{
rt_thread_startup(thread);
}
else
{
ret = RT_ERROR;
}
return ret;
}2.2、在main()中调用
uart_sample(1,"uart3");2.3、测试
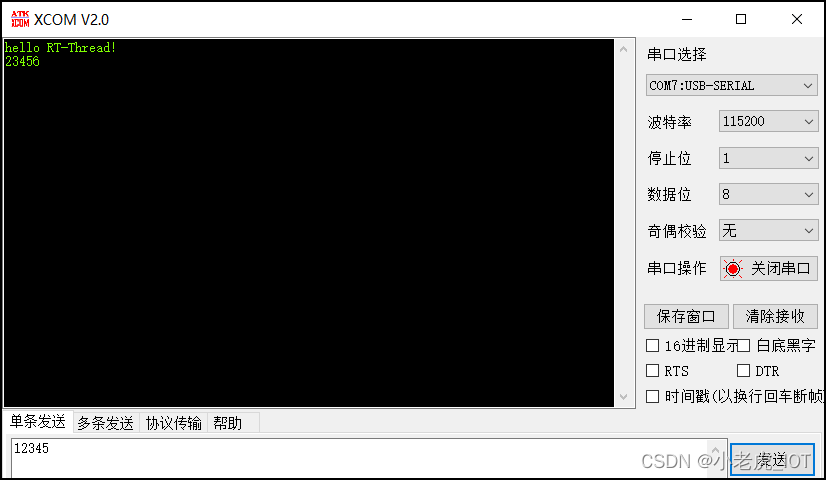
- 硬件连接:需要一个USB转串口模块,TX接串口3的RX(PB11),RX接串口3的TX(PB10);
- 串口助手:选好USB转串口的串口号,波特率115200,8位数据位,1位停止位,无校验位;
发送"12345",会返回"23456"就是成功的,因为例程里就是把接收到的每个字节数据加1后再用串口发送出去;

















 8031
8031

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









