




无刷直流电机(BLDC:Brushless Dc Motor)是一款应用广泛性能稳定的电动机,是多个领域重要的驱动部件,兼具传统直流电机的优异调速性能与交流电机的高结构可靠性。其取消了传统碳刷与滑环结构,通过电子电路实现无接触换向,可实现低速大功率运行,且具备体积小、重量轻、稳定性强、效率高、寿命长、噪声低及优良转速-转矩特性等优势,广泛应用于汽车、工业自动化、家用电器等多个行业。
(一)、核心硬件组成及关键参数
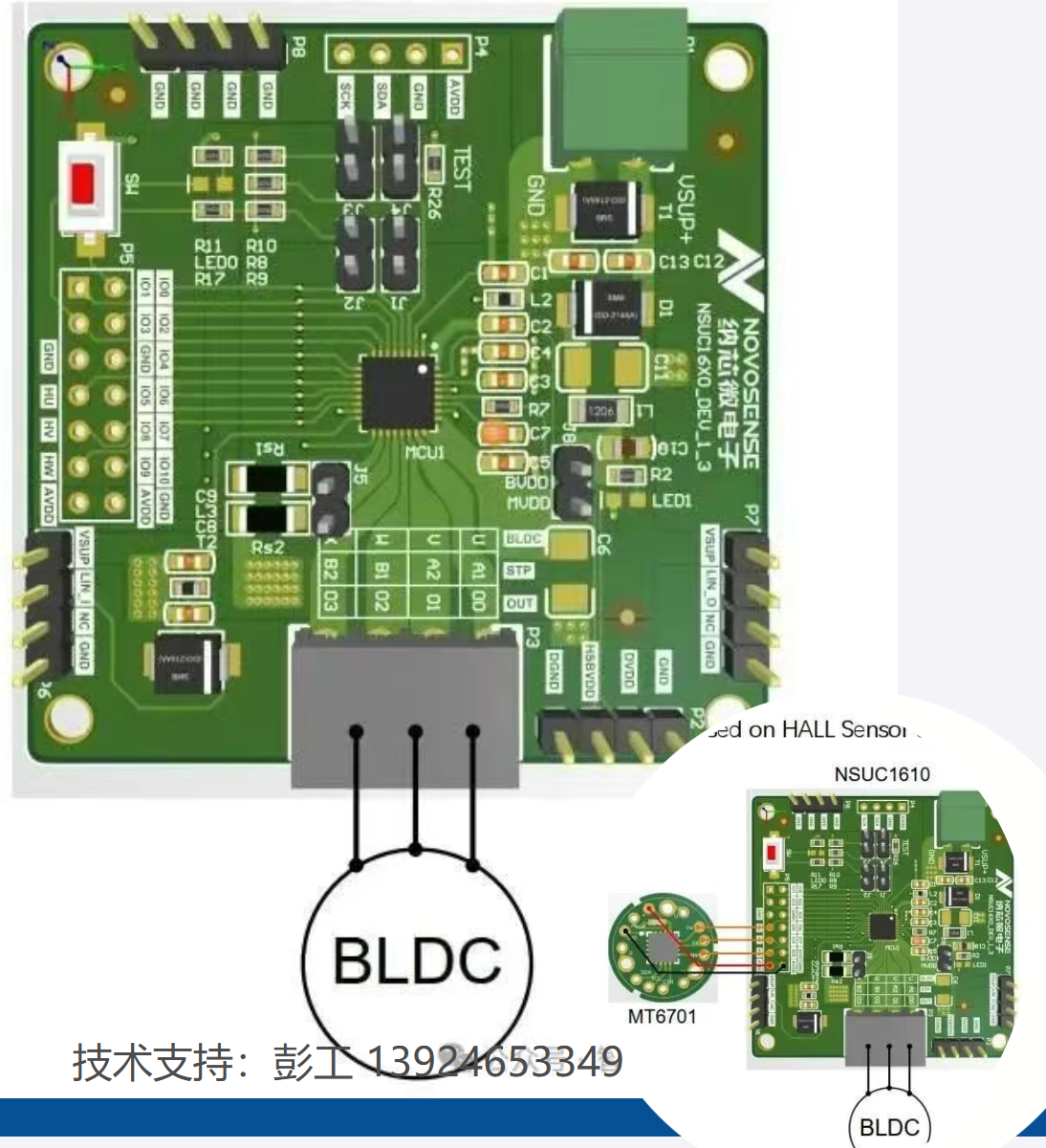
1.单控制器方案:纳芯微NSUC1610
NSUC1610是一款集成4路半桥驱动器的专用电机控制芯片,可直接驱动BLDC无需额外驱动器,有效节省成本,核心配置与性能参数如下
- 控制模式:NSUC1610兼容有传感器(如霍尔传感器)和无传感器两种BLDC控制方式,适配性与灵活性强。
- 核心与存储:其搭载ARM Cortex-M3 32位内核,配备64KB Flash、4KBSRAM及512B EEPROM,满足电机控制的程序存储与数据处理需求。
- 时钟与电压:支持32MHz高精度振荡器(保障控制精度)和35KHz低功耗低速时钟(适配低功耗场景):工作电压范围包括BVDD-5.5V~18V(主电源)、DVDD-1.62V~1.98V(数字电源,不可外部供电)、AVDD-4.5V~5.5V(模拟电源,输出电流<25mA),适配多种供电场景。
- 外设与通信:含1个12位高精度ADC、3个快速反电动势。(BEMF)比较器集成LIN PHY模块,支持LIN2.2通信协议:提供4路半桥输出,高边/低边导通阻抗典型值0.59,持续输出电流1A(RMS),峰值电流1.8A,适配电机驱动需求。
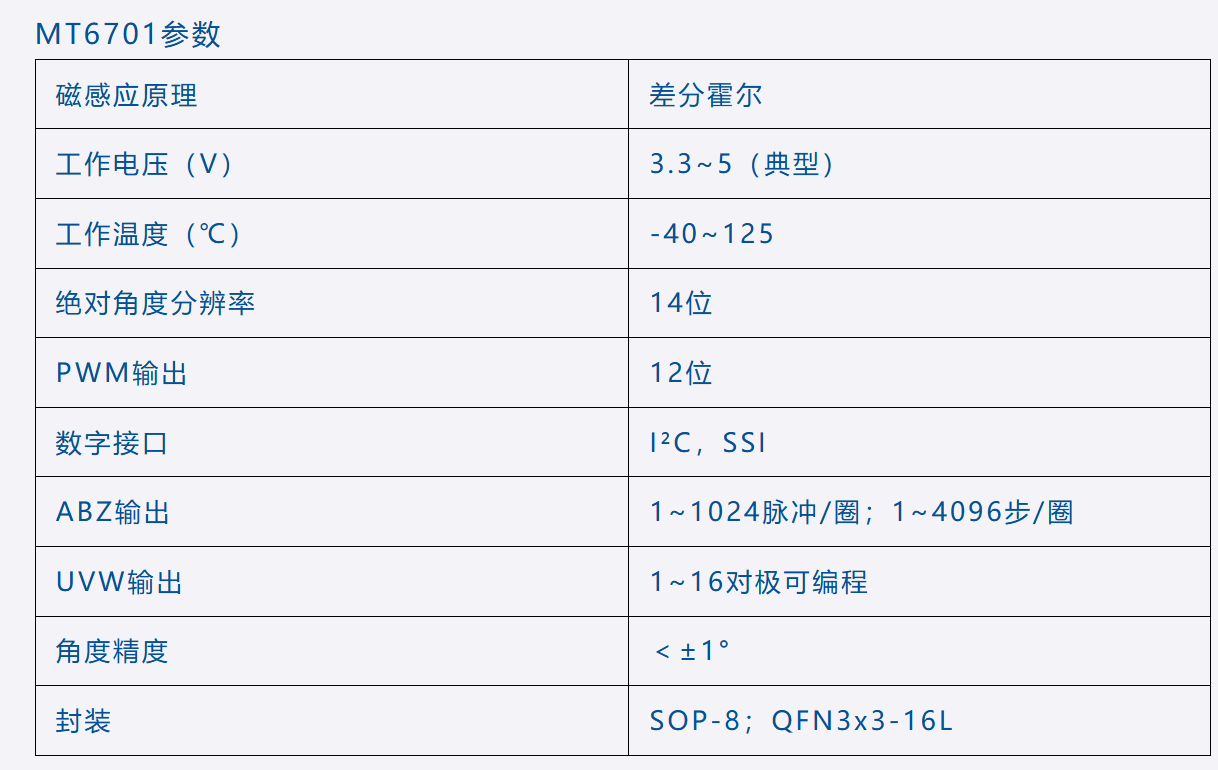
2.搭配传感器方案:纳芯微MT6701霍尔传感器
NSUC1610配合纳芯微的MT6701霍尔传感器,可实现更高精度的电机控制,核心特性如下
- 传感技术:基于差分水平霍尔磁感应原理,支持0~360°全量程角度检测,角度精度<±1°,能精准识别电机转子位置。
- 输出接口:接口配置丰富,包括I2C、SSI°、ABZ、UVW、模拟/PWM及Z轴按键功能,可灵活适配不同数据传输需求
- 性能指标:最高支持55000RPM转速,输出传播延迟仅5us,响应速度快:工作电流典型值14mA,VHBM=±6kV、VCDM=±1kV,抗干扰能力强
(二)、方案控制特性与性能表现
1、控制优势
- 反电动势比较器(BEMFC)在不同转速下对称性良好,可提升电机运行效率减少发热损耗;搭配MT6701的5us低延迟角度输出,实现实时闭环控制。
- 支持宽速度范围闭环控制,同时能基于霍尔信号或集成BEMFC模块输出信号实现位置控制,控制精度与稳定性突出。
- NSUC1610的12位高精度ADC(转换时间1us)可快速采集相电压、相电流信号,配合芯片内置的过压、欠压、热关断保护,进一步提升方案可靠性。
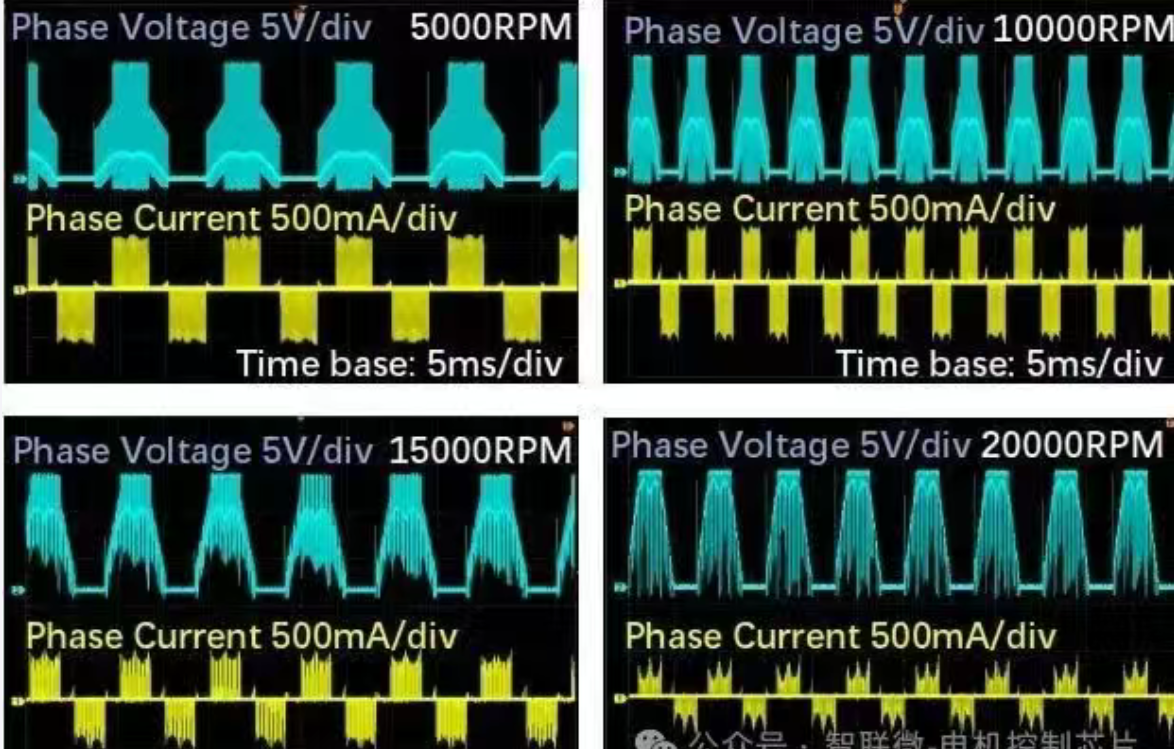
2、无负载波形特性
无负载条件下,电机在不同转速区间(5000RPM、10000RPM、15000RPM、20000RPM)的相电压与相电流波形均保持稳定对称。其中,相电压量程为5V/div,相电流量程为500mA/div,时间基准根据转速适配(5ms/div或2ms/div),体现出优异的运行一致性与电气稳定性。
(三)、电机对托实验结果
1、实验条件
控制板驱动占空比100%,逐步增加电机扭矩,测试扭矩与相电压、电流、效率功率、转速的关联曲线。
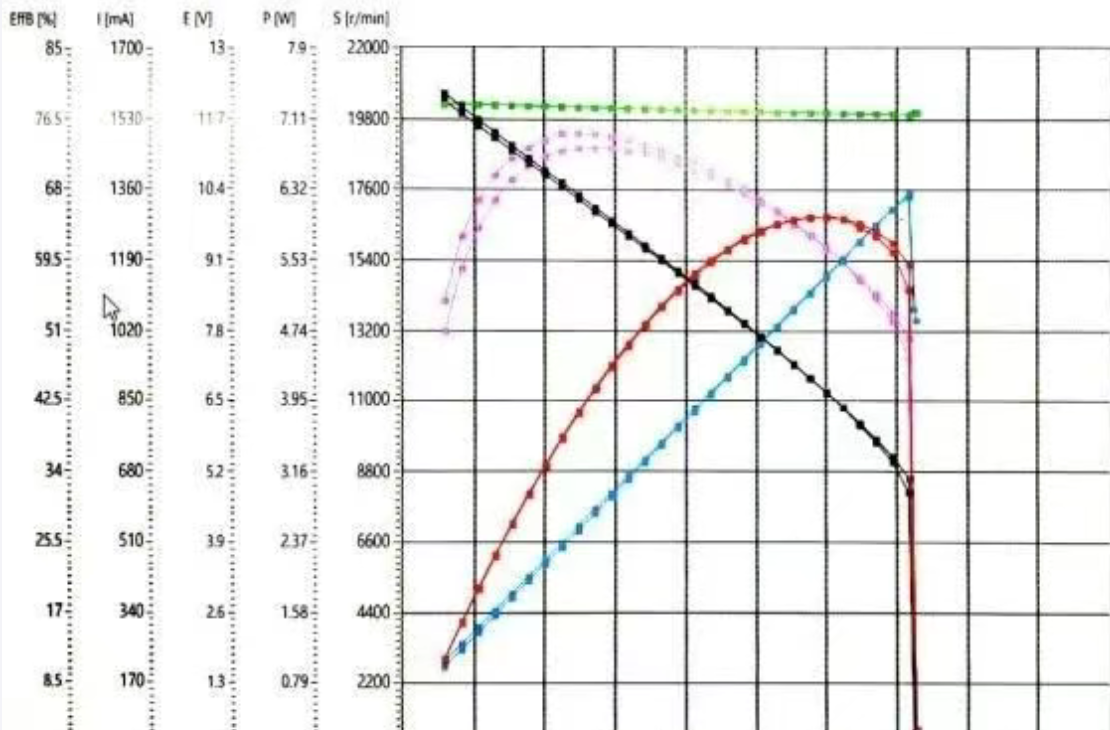
2、核心实验结论
- 转速与扭矩关系:随着扭矩增大,电机转速呈下降趋势(例如7.9mN.m对应22000RPM,1.7mN.m对应8800RPM等),扭矩-转速曲线线性度良好
- 效率对比:国产Novosns方案峰值效率为75%,Maxon方案峰值效率为76%,两者效率表现接近,处于同级别高效水平,
- 电气参数特性:实验过程中,相电压、相电流随扭矩增大呈平稳上升趋势,无明显波动,验证了方案在不同负载下的电气稳定性。
核心产品介绍

(一)NSUC1610控制器
NSUC1610是纳芯微一款高集成的专用电机控制处理器芯片,特别适用于小功率电机驱动,可以驱动有刷直流电机、无刷直流电机、步进电机等多种电机,在汽车领域应用广泛。核心特性补充如下
- 符合AEC-Q100汽车电子标准最高结温可达175℃,工作温度范围为-40℃~150℃,适配极端工况。
- 集成过压保护(LIN端口、BVDD引脚宽电压耐受)、欠压检测(BVDD欠压阈值4档可编程)、热关断保护(TSD),同时I/0端口支持5V耐压,高可些
- 内核是基于ARM指令集的Cortex-M3,采用哈佛结构,使用独立的数据总线和地址总线,提高了传输地址信号和数据信号的效率。
- 物理特性:采用QFN32(5x5mm)封装,暴露盘需焊接至PCB以保障散热;引脚数量32个,1/0输出电流±4mA,MOUT引脚持续电流1A、峰值1.8A,满足小功率电机驱动需求。
(二)MT6701霍尔传感器
MT6701是麦歌恩(现属纳芯微)推出的新一代基于差分水平霍尔磁感应原理的角度位置传感器芯片。芯片内部通过集成两对互成90°放置的差分霍尔惠斯通电桥,感应在芯片X-Y平面上旋转磁铁的Z轴磁场分量,并随着磁场角α的变化输出两路正弦的电压信号,再经后续专用电路的放大、补偿和计算后得到角度值α,抗杂散磁场干扰能力优异。
- 提供替代传统光电编码器的增量ABZ“输出接口,增量输出最大分辨率为1024脉冲/圈(4096步/圈),可编程。
- 提供替代开关霍尔换相的增量UVW信号,1~16对极可编程,
- 配备标准的12C或SSI接口,支持读取14位绝对角度数据,12C时序兼容标准协议,SSI支持CRC校验。
- 单线输出的PWM或者模拟信号,提供分辨率为12位的绝对角度数据
- PUSH引脚支持非接触式按压识别,可通过寄存器配置灵敏度与响应时间,拓展人机交互场景。
- 内部集成了EEPROM,烧写电压为4.5V~5.5V,支持参数反复多次擦写

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









