




ROS与MATLAB网络连接
ROS网络由一个 ROS主节点(ROS master) 和多个ROS节点 (ROS node) 组成。ROS主机通过跟踪所有活跃的ROS实体来促进ROS网络中的通信。每个节点都需要向ROS主机注册,才能与网络的其余部分通信。
完整的连接步骤如下:
- 连接到ROS网络。要连接到ROS网络,一种方式是通过主机端(一般为linux系统)通过
roscore启动ros主节点,其他从机端在不同的主机上创建节点(MATLAB通过rosinit建立) 。 - 一旦两台机器建立连接,两台机器便可正常进行ros通讯(话题通讯、服务通信等)
- 当节点需要断开网络的时候,可通过
rosshutdown关闭当前节点;
下面将展示两种不同的连接方式:
- 在MATLAB创建
master主节点 - 连接外部的
master主节点,也就是在其他机器上已经创建好了主节点
在MATLAB创建master主节点
在MATLAB中创建ROS主控器,调用rosinit无需传入任何参数。该函数还创建全局节点,MATLAB使用该节点与ROS网络中的其他节点进行通信。
rosinit
Launching ROS Core…
Done in 0.53007 seconds.
Initializing ROS master on http://172.29.207.162:57063.
Initializing global node /matlab_global_node_94513 with NodeURI http://dcc434238glnxa64:43127/ and MasterURI http://localhost:57063
出现上述字段说明创建成功,此时MATLAB外部的ROS节点现在可以加入ROS网络。他们可以使用MATLAB主机的主机名或IP地址连接到MATLAB中的ROS主机。
您可以通过调用rosshutdown来关闭ROS主机和全局节点。
rosshutdown
Shutting down global node /matlab_global_node_94513 with NodeURI http://dcc434238glnxa64:43127/ and MasterURI http://localhost:57063.
Shutting down ROS master on http://172.29.207.162:57063.
连接外部的master主节点
还可以使用rosinit命令(这里需要指定主机地址)连接到外部ROS主机(例如在机器人或虚拟机上运行)。可以通过两种方式指定主机的地址:通过IP地址或运行主机的计算机的主机名。
同一台机器上在每次调用rosinit之后,必须先调用rosshutdown,然后再使用不同的语法调用rosinit,防止出现节点冗余错误。
“master_host”是示例主机名,“192.168.1.1”是外部ROS主机的示例IP地址。根据外部主机在网络中的位置调整这些地址。如果在指定地址找不到主机,这些命令将失败。
rosinit('192.168.1.1')
rosinit('master_host')
上述两个命令通常执行一个便可,我的建议是初始化IP,这样可排除有的机器主机名没被解析的情况。
对rosinit的两次调用都假定主机在端口11311上接受网络连接,这是标准的ROS主机端口。如果主机在不同的端口上运行,可以将其指定为第二个参数。要连接到主机名master_host和端口12000上运行的ROS主机,请使用以下命令:
rosinit('master_host',12000)
或者也成URI的形式:
rosinit('http://192.168.1.1:12000')
特别指定节点的主机
在某些情况下,您的计算机可能连接到多个网络并具有多个IP地址。此图显示了一个示例。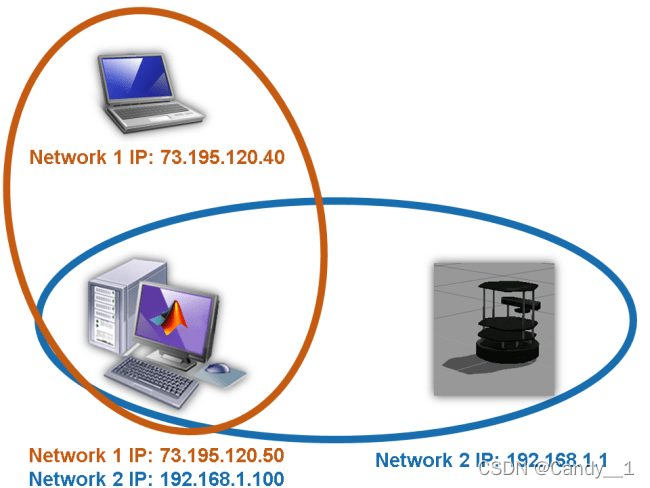
左下角的计算机运行MATLAB,并连接到两个不同的网络。在一个子网中,其IP地址为173.195.120.50,在另一个子网中,其IP地址为192.168.1.100。此计算机希望连接到TurtleBot®计算机上IP地址为192.168.1.1的ROS主机。作为向主机注册的一部分,MATLAB全局节点必须指定其他ROS节点可以访问的IP地址或主机名。TurtleBot上的所有节点都将使用此地址向MATLAB中的全局节点发送数据。
当使用主机的IP地址192.168.1.1调用rosinit时,它会尝试检测用于联系主机的网络接口,并将其用作全局节点的IP地址。如果自动检测失败,您可以通过使用rosinit调用中的NodeHost name值对显式指定IP地址或主机名。NodeHost name-value对可以与已经显示的任何其他语法一起使用。
这种情况常常发生在左下角机器中创建了docker容器时需要不同网络的通讯。
这些命令向ROS网络公布您计算机的IP地址为192.168.1.100。
rosinit('192.168.1.1','NodeHost','192.168.1.100')
rosinit('http://192.168.1.1:11311','NodeHost','192.168.1.100')
rosinit('master_host','NodeHost','192.168.1.100')
以上命令选择其中之一即可。
在ROS网络中注册节点后,您可以使用命令rosnode info<nodename>查看其播发的地址。通过调用节点列表,可以查看所有已注册节点的名称。
ROS 环境变量
在高级用例中,您可能希望通过标准ROS环境变量指定ROS主机的地址和播发的节点地址。前面几节中解释的语法对于大多数用例来说应该足够了。
如果没有为rosinit提供参数,该函数还将检查标准ROS环境变量的值。这些变量是ROS_MASTER_URI、ROS_HOSTNAME和ROS_IP。可以使用getenv命令查看它们的当前值:
getenv('ROS_MASTER_URI')
getenv('ROS_HOSTNAME')
getenv('ROS_IP')
可以使用setenv命令设置这些变量。设置环境变量后,无需参数调用rosinit。ROS主机的地址由ROS_master_URI指定,全局节点的播发地址由ROS_IP或ROS_HOSTNAME给出。如果为rosinit指定其他参数,它们将覆盖环境变量中的值。需要说明的是ROS_IP或ROS_HOSTNAME两者互为解析,通常选择一个即可。
您不必同时设置ROS_HOSTNAME和ROS_IP。如果两者都设置了,则ROS_HOSTNAME优先。

















 2316
2316

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









