






ROS Melodic环境下USB摄像头配置与调用指南(附完整命令集)
目录
ROS Melodic环境下USB摄像头配置与调用指南(附完整命令集)
一、环境准备与版本确认
- 检查ROS版本
执行命令确认当前ROS发行版:echo $ROS_DISTRO - 创建工作空间(如已有可跳过)
mkdir -p ~/catkin_ws/src cd ~/catkin_ws/ catkin_make source devel/setup.bash
二、安装usb_cam驱动包
方式1:APT便捷安装
sudo apt-get install ros-melodic-usb-cam此方式会自动处理依赖关系,适合快速部署。
方式2:源码编译安装
cd ~/catkin_ws/src
git clone https://github.com/ros-drivers/usb_cam.git
cd ..
catkin_make
ource devel/setup.bash源码安装可获取最新功能,适合定制化需求。
三、启动USB摄像头节点
基础启动命令
roslaunch usb_cam usb_cam-test.launch运行结果分析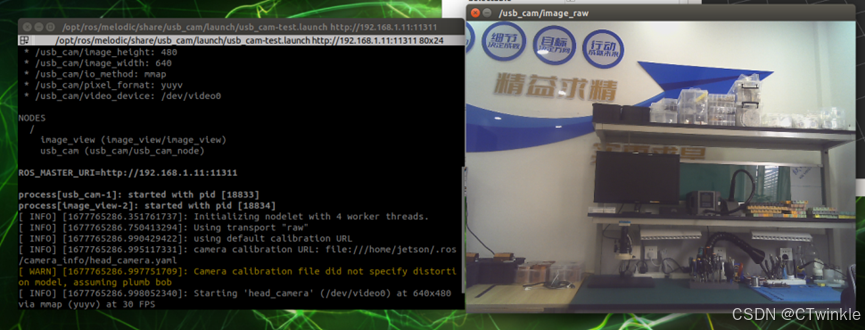
-
参数调整方法
- 修改设备节点:
编辑usb_cam-test.launch,调整video_device值(如/dev/video1) - 调整分辨率:
修改image_width和image_height参数(需摄像头支持)。
- 修改设备节点:
四、功能验证与调试
- 查看图像话题
rostopic list | grep image - 实时预览图像
rosrun image_view image_view image:=USBCam - 设备参数查询
v4l2-ctl --list-formats-ext -d /dev/video0
五、常见问题排查
- 设备未识别
- 执行
ls /dev/video*确认设备号 - 检查摄像头物理连接与供电
- 执行
- 分辨率不支持
- 通过
v4l2-ctl命令验证支持的分辨率 - 在launch文件中配置有效参数
- 通过
- 依赖缺失
若提示image_view缺失,安装:sudo apt-get install ros-melodic-image-view
六、扩展应用方向
-
多摄像头同步
复制launch文件并修改设备号,实现多设备并行采集 -
与OpenCV整合
通过cv_bridge将ROS图像转换为OpenCV格式 -
视觉SLAM应用
作为ORB-SLAM等算法的输入源
源码地址:https://github.com/ros-drivers/usb_cam
本文测试环境:Ubuntu 18.04 + ROS Melodic
更多ROS视觉开发技巧,欢迎关注作者专栏 ➜


















 7840
7840

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









