




目录
引言
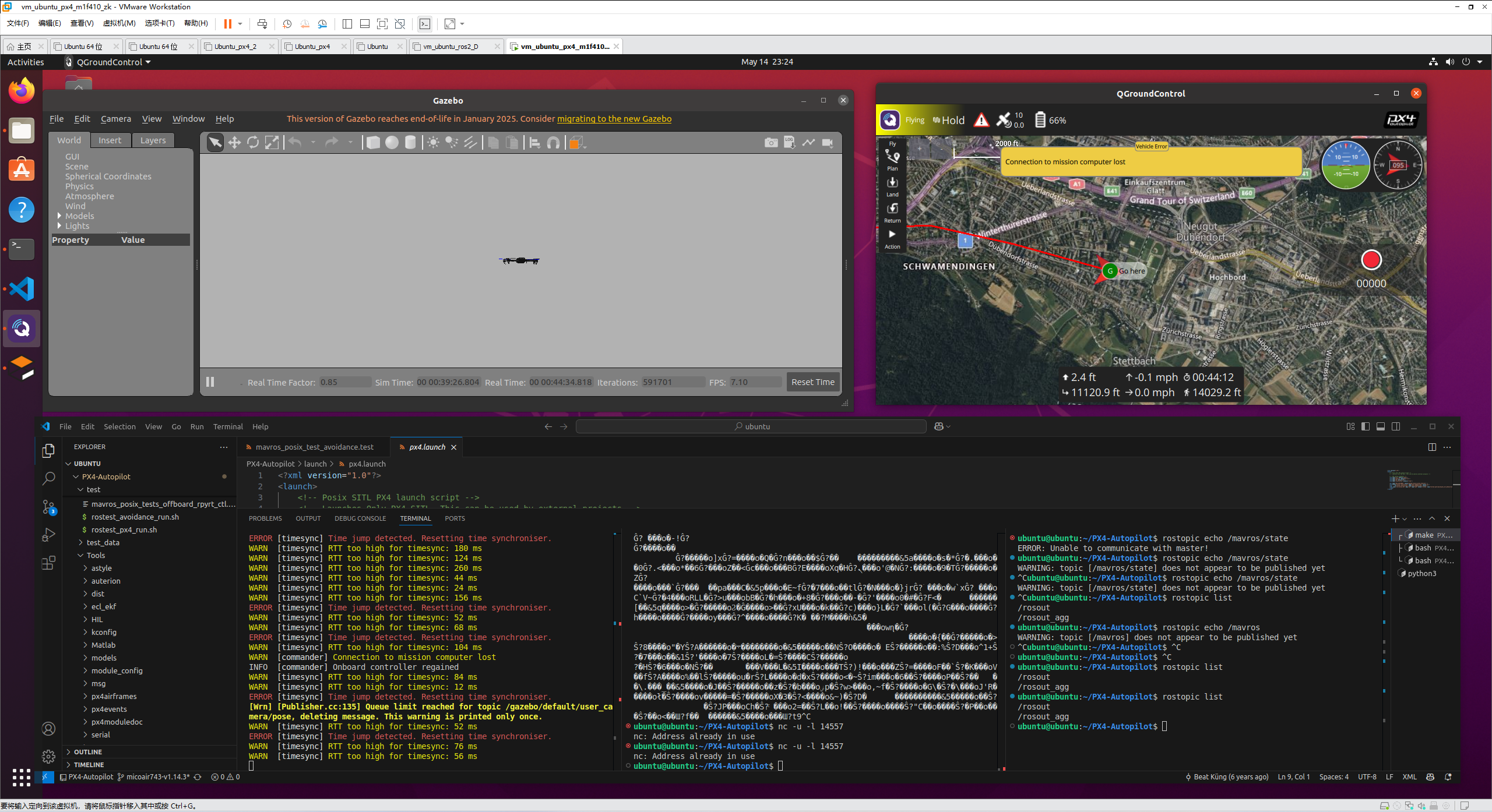
在实际中想要测试一架无人机时在室外一旦出现错误将会带来非常大的损失,为此在真实场景测试前需要进行gazebo仿真操作,然而程序和环境在Jetson机载电脑中,需要Jetson发送ros命令给电脑虚拟机进行仿真,为此需要设置Jetson和虚拟机进行通信仿真。
1.PX4虚拟环境的安装
1.更新源
sudo apt-get update
sudo apt-get install git 2.拉取源代码
git clone https://github.com/Minderring/PX4-Autopilot.git3.安装PX4
cd PX4-Autopilot
sudo bash ./Tools/setup/ubuntu.sh
sudo apt-get install libjpeg-dev zlib1g-dev
sudo -H python3 -m pip install kconfiglib
sudo -H python3 -m pip install pyros-genmsg
sudo -H python3 -m pip install toml
sudo -H python3 -m pip install numpy
sudo -H python3 -m pip install jinja2
sudo -H python3 -m pip install em
sudo -H python3 -m pip install jsonschema
sudo -H python3 -m pip install packaging
sudo -H python3 -m pip install --ignore-installed empy
sudo -H python3 -m pip install --ignore-installed future
如果上面的命令安装后还是报错,可以用下面的命令安装:
pip3 install kconfiglib
pip3 install --user empy
pip3 install --user jsonschema
pip3 install --user jinja2
pip3 install --user pyros-genmsg
pip3 install --user packaging
pip3 install --user toml
pip3 install --user numpy
sudo apt-get install gcc-arm-none-eabi
sudo chmod 777 /usr/include/newlib/math.h
sudo apt-get install libgazebo9-dev
sudo apt install libopencv-dev python3-opencv
sudo apt-get install libeigen3-dev
pip3 inst 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 8999
8999

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









