 分心驾驶实时检测
分心驾驶实时检测





 本文提出一种基于卷积神经网络的时空方法,用于实时分类驾驶员的分心水平。该方法利用预训练BN-Inception模型从稀疏帧中抽取特征,并结合光流与RGB模型提升精度。实验结果显示,在分心驾驶数据集上达到了99.10%的分类准确率。
本文提出一种基于卷积神经网络的时空方法,用于实时分类驾驶员的分心水平。该方法利用预训练BN-Inception模型从稀疏帧中抽取特征,并结合光流与RGB模型提升精度。实验结果显示,在分心驾驶数据集上达到了99.10%的分类准确率。
论文地址:https://arxiv.org/pdf/1907.08009.pdf
摘要
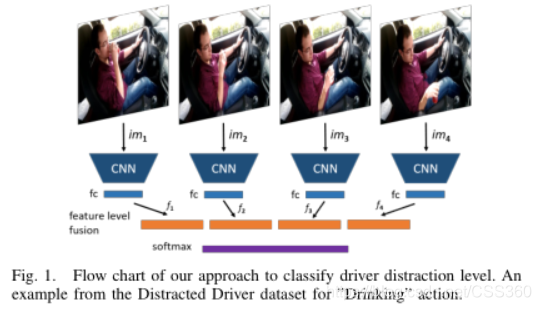
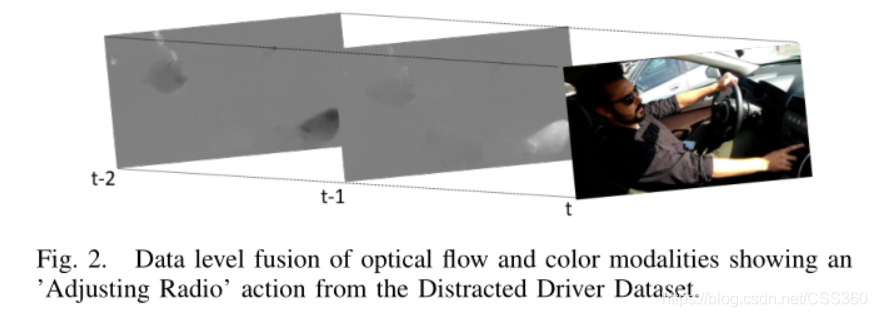
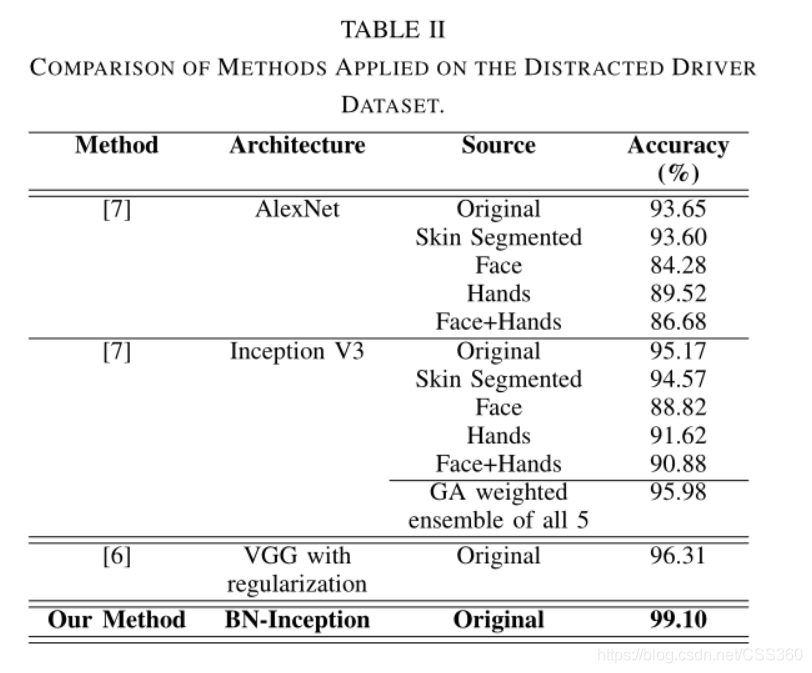
交通事故的发生由于司机分心。今天,司机监视是必要的对于最近自动驾驶汽车来提醒司机为了控制车辆事故发生。在这篇文章中,一个时空方法被应用到分类驾驶人的分心水平和移动决策使用卷积神经网络(CNNs)。我们解决这个问题作为动作识别有效从模板信息以及空间信息。我们的方法依赖特征提取从稀疏选择的帧,一个动作使用一个预训练BN-Inception。实验表明我们的方法性能优越在分心驾驶数据集(96.31%),达到一个精度99.10%对于10类分类并提供实时分类。我们也分析这个影响融合使用RGB和光流模型,一个最近的数据水平的融合策略。结果在Distract Driver 以及 Brain4Cars数据集展示融合的这些模型提高了精度。
驾驶员喝水动作
光流和颜色模型融合
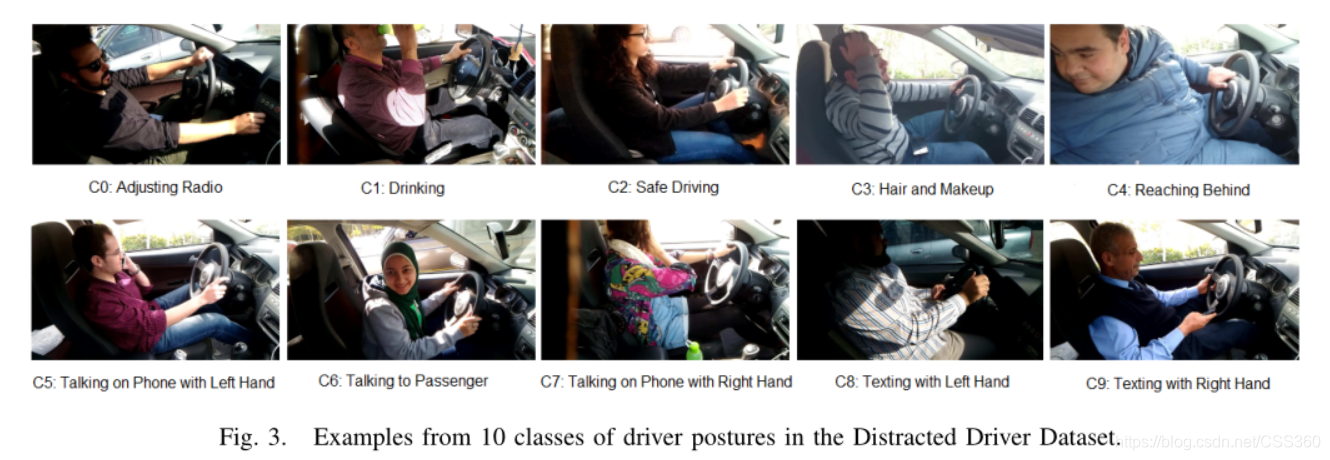
数据集中10种分类
方法效果对比
了解更多关于《计算机视觉与图形学》相关知识,请关注公众号:

下载我们视频中代码和相关讲义,请在公众号回复:计算机视觉课程资料

















 2092
2092

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









