







ROS机器人---创建编译并运行完整的ros helloword工程(c++版)
注意
系统:Ubuntu16.04 LST
ros版本:kinetic
一、创建工作空间
在home目录下创建名称为ros_test_ws 的工作空间
mkdir -p ros_test_ws/src #新建ros_test_ws/src 目录
cd ros_test_ws/src
catkin_init_workspace
cd .. #退到 ros_test_ws 路径下
catkin_make #编译
source devel/setup.bash #配置暂时的环境变量
echo $ROS_PACKAGE_PATH # 查看刚刚配置的环境变量是否生效
ros package 路径包含有刚刚创建的工作空间目录

二、创建软件包(project)
创建名称为 my_ros_helloworld_cpluse 的软件包
cd catkin_ws/src # 进入工作空间下的 src 目录 (注意路径!!!)
catkin_create_pkg my_ros_helloworld_cpluse std_msgs rospy roscpp
cd .. #退到 catkin_ws 工作空间路径下
catkin_make #编译软件包
三、使用CLion IDE 软件开发 (本工程可以不需要)
使用CLion IDE 便于后续的大型开发
3.1 打开工程
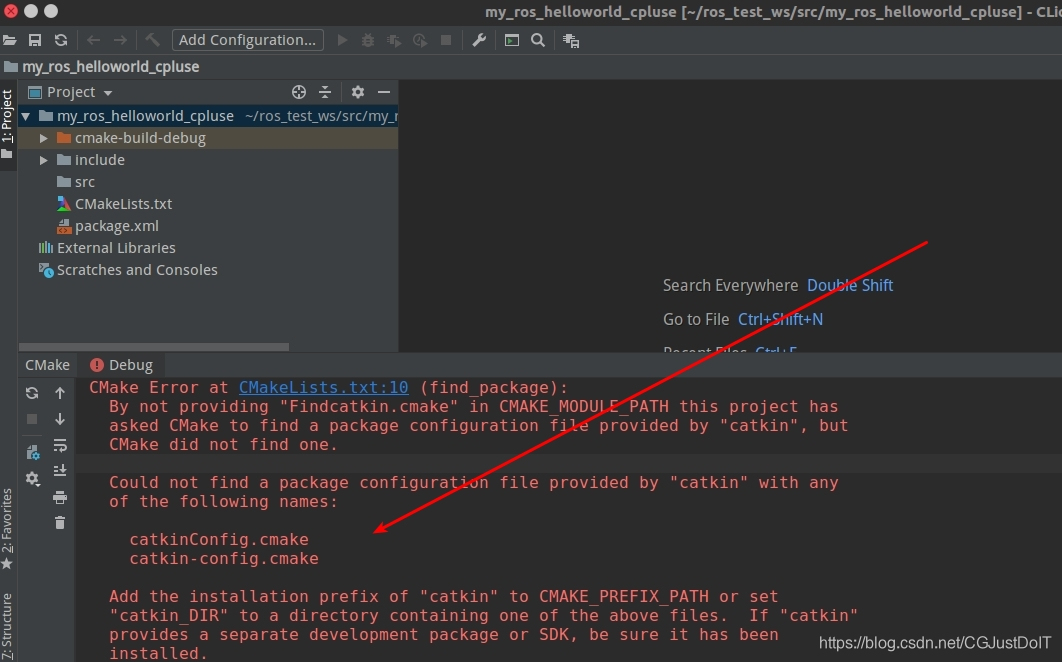
忽略如下错误 (编译是需要进入 ros_test_ws/src目录下进行 catkin_make 编译的)
3.2 编写talker.cpp 创建消息发布器节点 (发布话题)
创建src/talker.cpp 文件
#include <iostream>
#include <ros/ros.h>
#include <std_msgs/String.h>
#include <sstream>
using namespace std;
int main( int argc, char** argv  最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 688
688

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









