



一、服务
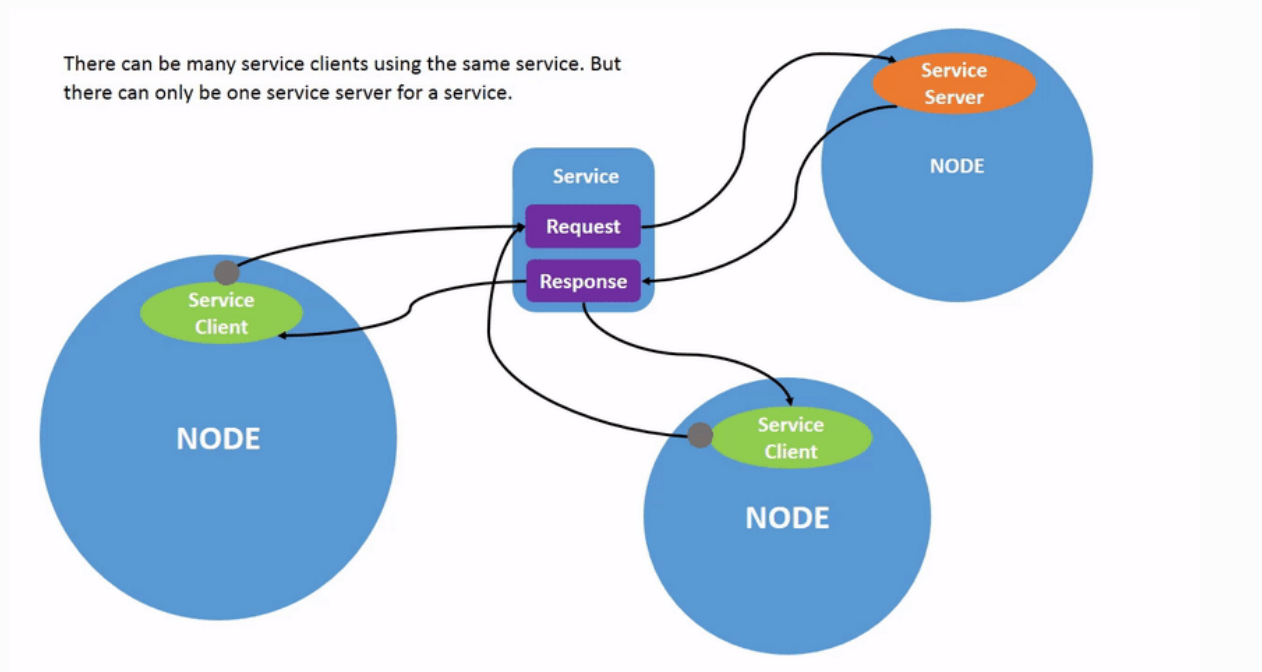
服务是什么。话题是一种发布-订阅的信息传播方式,而服务则是一种请求-回应的信息传播方式。
二、一些服务调试命令
#获取服务列表 ros2 service list#获取服务参数类型
ros2 service type <service_name>#上面两种的调和
ros2 service list -t#服务的请求响应详细信息
ros2 service info <service_name>#寻找对应的服务类型的服务
ros2 service find <type_name>
#对应服务类型的详细信息
ros2 interface show <type_name>#发布请求
ros2 service call <service_name> <service_type> <arguments>
#了解服务详情
ros2 service echo <service_name | service_type> <arguments>

















 52
52

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









