



一、话题
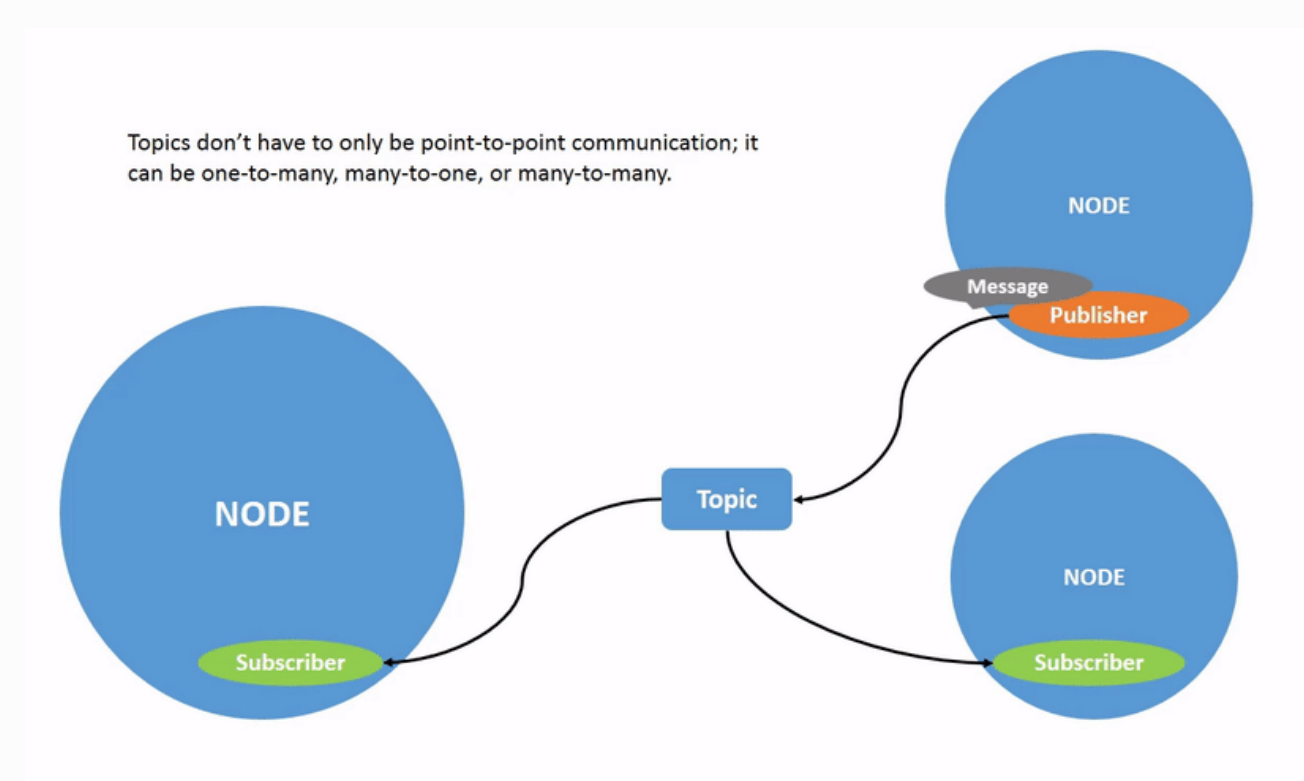
话题,即信息的载体。节点间,通过话题,传输信息。
二、话题的查看和调试
最常用的是
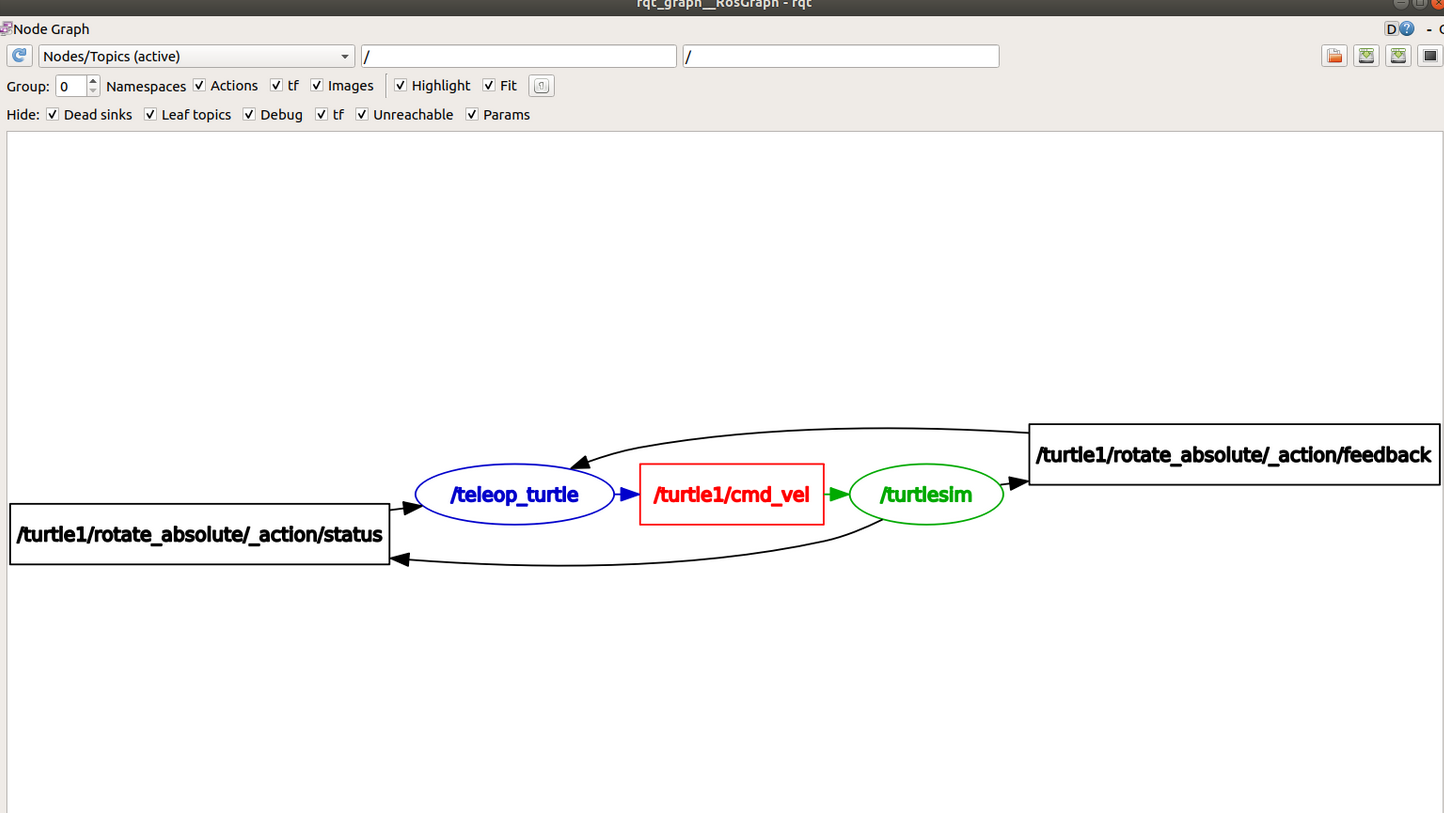
ros2 run rqt_graph rqt_graph
用来查看节点,话题之间的整体的关系
然后是一些其他的调试命令
#查看所有话题 ros2 topic list#查看所有话题plus版,加上了话题的消息类型
ros2 topic list -t#监听话题的内容
ros2 topic echo /turtle1/cmd_vel#话题的详细信息,比如,信息是什么类型,几个发布者,几个订阅者
ros2 topic info /turtle1/cmd_vel#话题的详细信息plus,包括下面这些信息
#Node names and namespaces of publishers and subscribers
#Topic type
#QoS profiles
ros2 topic info /turtle1/cmd_vel --verbose
#查看消息的内容
ros2 interface show geometry_msgs/msg/Twist#话题直发
ros2 topic pub <topic_name> <msg_type> '<args>'--once #只执行一次
--w 2 #wait for two matching subscriptions
#话题发布的频率
ros2 topic hz /turtle1/pose#话题发布的带宽
ros2 topic bw /turtle1/pose#找到发布对应的话题类型的话题
ros2 topic find <topic_type>


















 271
271

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









