



一、节点是什么
在ROS中,节点是一个相当重要的概念,如果学过ROS1,那么对这一点,将会深有感触。
节点,其实理解起来还是很简单的,节点,即为信息传输的载体。在ROS中,需要操控机器人运动或者执行特定的功能,都是通过节点来实现的。
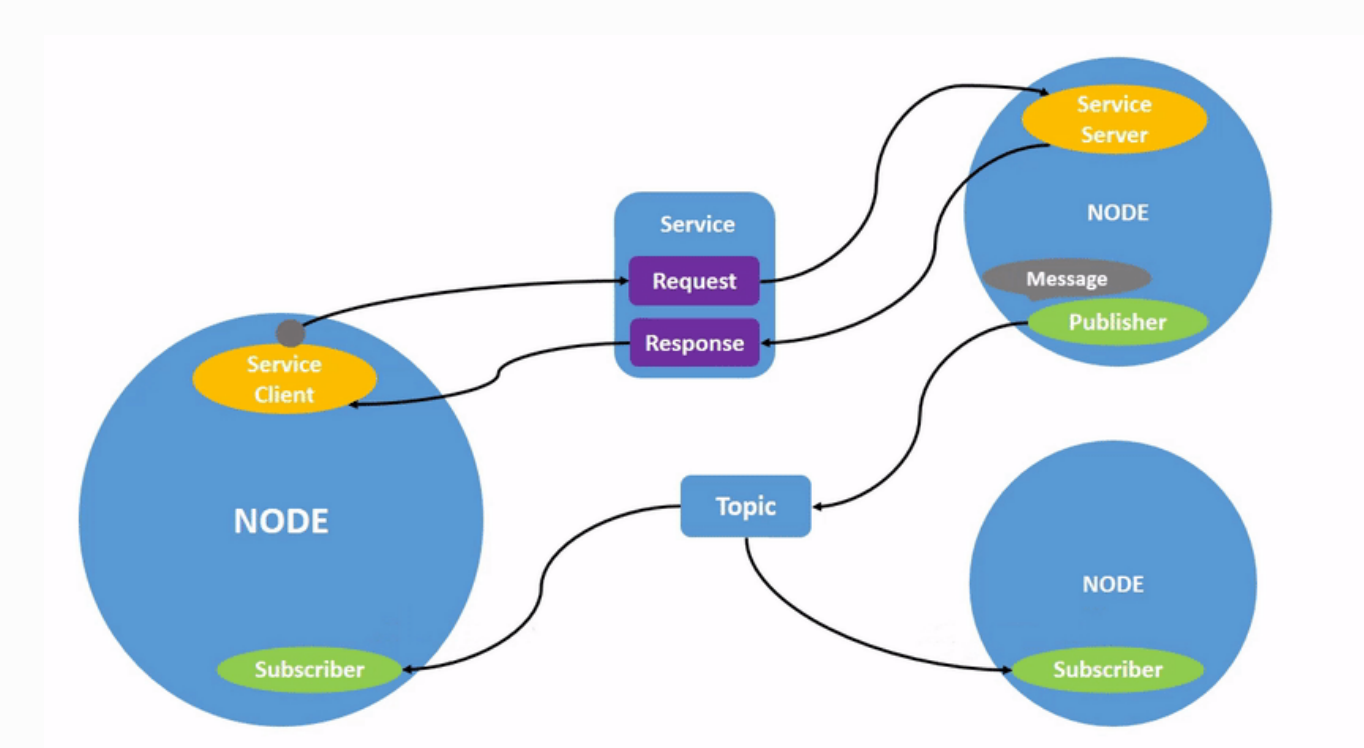
在一个机器人系统中,一般存在着多个的节点节点之间,通过话题,服务,动作或者参数服务进行数据的传输。
相较于ROS1,这种分布式的节点,使得系统的运行状况更加的稳健。
二、节点的调试
ros2 node list
#列出所有的节点
ros2 node info
#节点的详细信息

















 53
53

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









