



前言
有没有发现如今AI 越来越聪明,但我们却越来越难让它“听懂人话”。其实问题在于不是模型不行,而是你不会说“它的语言”。
我们先盘点一下几个问题
一、提示词工程“过时”了吗?
首位「提示词指南」作者Sander 说:提示词不仅没过时,反而比以前更重要。
他总结了三大误解:
❌ 误解一:AI 会自然语言了,Prompt 没用了?
错。AI 不会“猜测”你的意图,它只根据你每个词去预测任务是什么。写得清楚 ≠ 它能理解。
❌ 误解二:Prompt 不就凑几个关键词?
错。Sander 的测试表明,仅仅换一种表达方式,准确率就能从 10% 提升到 90%。Prompt 是决定结果好坏的关键变量。
❌ 误解三:Prompt 太难,普通人用不上?
错。他强调:提示词结构应该是“像模板一样好上手”,人人可用。比如“我们一步步来想想”,就能显著提升逻辑清晰度。
二、5套万能提示词结构,让AI听懂人话
Sander 用 3 个月时间筛出 5 种最有效提示方法。这些技巧适用于所有主流模型、所有常见任务。
✅ 技法一:少样本示例(Few-shot)
与其从零开始,不如先贴一个示例,
比如:“这是一封我写的邮件,请照这个风格再写一封”。
模型会自动从例子里学习语言、语气、结构,而不用过多的解释。
✅ 技法二:任务拆解(Decomposition)
复杂任务别一口气丢给 AI。拆成多个子任务,每一步清晰指令。例如退货流程可拆为:判断退货资格 → 检查车辆状况 → 写通知信。
这种方式的本质是:别指望 AI 一步到位,而是学会一步步布置任务。Sander把这叫做“子任务 + 代理协调”的组合打法。
✅ 技法三:自我批评(Self-Critique)
AI 不擅长直接改错,但擅长“给建议”。你可以让它先自我审查,然后根据它提的修改意见重写。
✅ 技法四:补充背景(Additional Context)
上下文越完整,准确率越高。
例如,AI 判断用户是否有需求时,加上用户历史背景,准确率显著提升。
✅ 技法五:提示集成(Ensembling)
一个 Prompt 不够稳?那就组合多个 Prompt,让 AI 综合判断,或你手动挑选最佳输出,提升稳定性和鲁棒性。因为不同提示会触发不同的思维路径。
三、为什么这些技巧有效?
Sander认为:提示词的作用不是“碰运气”,而是帮 AI 建立明确的“任务预期”。
🎯 明确“该回答什么”
比如“能帮我看看这个吗?”AI 可能根本不知道“这个”指什么。明确背景就能提升理解率。
🧭告诉它“怎么回答”
AI 默认倾向于“多说”而不是“说准”,所以你要用结构、语气、格式来明确它该怎么答。
🧯 降低“猜测空间”
提示越清晰,模型越不容易胡说八道。Sander 说:只要组合使用 2~3 个技巧,答偏几率就能下降七成。
四、提示词是“调试”工具,还是“系统”接口?
Sander 区分了两种使用模式:
✍️ 聊天式提示(Chat-based Prompting)
适合个人用户:对话试错、反复调教,直到答案满意。
🧠 系统化提示(Product Prompting)
适合AI产品:设计固定结构、标准模板、一致执行。像 Granola、Replit 这些公司就将提示词工程化,模块化输出,不依赖手动调试。
区别在于:
聊天调提示,是试着让它“这次行”;设计提示系统,是让它“每次都行”。
五、这些“提示技巧”可能不太行了
Sander 用实验证明:下面这类提示词没用,甚至可能让效果更差。
🚫 “你是某某专家”式角色扮演
对比实验表明,这种写法几乎无效果提升,更多是心理安慰。
🚫 “答错就会被处罚”式恐吓或奖励
AI 并不理解你的情绪。说“做对给你奖励”只是在浪费 token,它不会因此更聪明。
这些花哨写法不仅无效,还可能干扰模型注意力,让答案更不靠谱。
六、提示词是一套人与AI的“协作协议”
Sander 指出:Prompt 是人和 AI 协作的接口语言,本质上是一份“任务书”。
提示词的三个隐藏功能:
- 协调器:明确主线任务;
- 筛选器:提取关键信息,避免跑题;
- 执行计划:交代格式、顺序、输出要求。
例如:
你是一位项目经理,需要对以下日报做总结:
1)概括项目进展;2)识别潜在风险;
3)生成三句话报告,发给 CEO。
这不是一句“提问”,而是清晰的任务框架。这正是 Prompt 工程化的关键。
七、Prompt工程的未来趋势
Sander 认为 Prompt 正在走向“模板化 + 结构化 + 可复用”。像代码一样管理提示词,将是未来团队标配:
- 明确场景(客服、文案、代码等)
- 固定输入模板
- 多模型测试,筛选最稳输出
他参与的 HackAPrompt 挑战赛和 Prompt Report 工具,正在推动这场转型。
入门建议:从“总结型任务”开始练习 Prompt
Sander 建议,从结构稳定、目标清晰的任务入手训练,例如:
- “你是内容编辑,请将以下内容整理为 100 字总结,包含一个关键数据和一句观点。”
- “请根据以下日报内容,生成三句话总结,突出风险、进展和建议。”
这些任务简单好检验,非常适合 Prompt 工程的入门练习。
Prompt 不只是提升效率的“用法”,而是未来 AI 能力释放的关键路径。掌握 Prompt,不是写得“像人”,而是让 AI 明确“该怎么做”。写 Prompt,不是问问题,而是在设计 AI 的任务流程。
最后
为什么要学AI大模型
当下,⼈⼯智能市场迎来了爆发期,并逐渐进⼊以⼈⼯通⽤智能(AGI)为主导的新时代。企业纷纷官宣“ AI+ ”战略,为新兴技术⼈才创造丰富的就业机会,⼈才缺⼝将达 400 万!
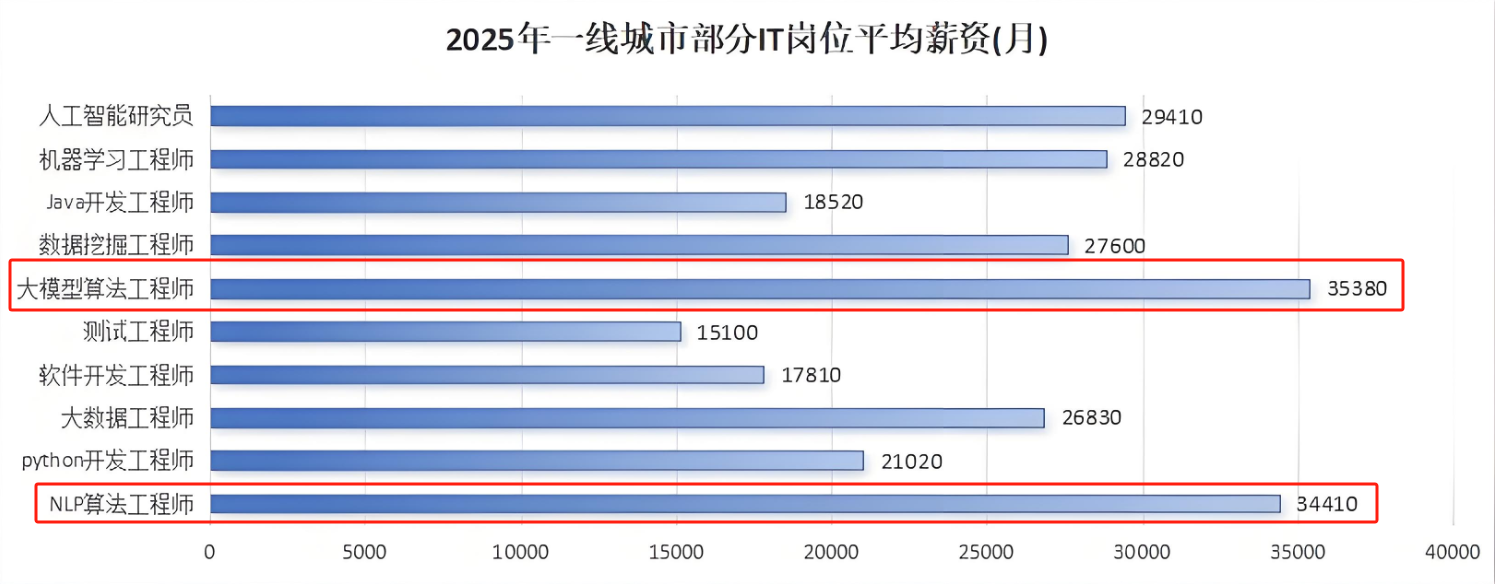
DeepSeek问世以来,生成式AI和大模型技术爆发式增长,让很多岗位重新成了炙手可热的新星,岗位薪资远超很多后端岗位,在程序员中稳居前列。
与此同时AI与各行各业深度融合,飞速发展,成为炙手可热的新风口,企业非常需要了解AI、懂AI、会用AI的员工,纷纷开出高薪招聘AI大模型相关岗位。

最近很多程序员朋友都已经学习或者准备学习 AI 大模型,后台也经常会有小伙伴咨询学习路线和学习资料,我特别拜托北京清华大学学士和美国加州理工学院博士学位的鲁为民老师给大家这里给大家准备了一份涵盖了AI大模型入门学习思维导图、精品AI大模型学习书籍手册、视频教程、实战学习等录播视频 全系列的学习资料,这些学习资料不仅深入浅出,而且非常实用,让大家系统而高效地掌握AI大模型的各个知识点。
这份完整版的大模型 AI 学习资料已经上传优快云,朋友们如果需要可以微信扫描下方优快云官方认证二维码免费领取【保证100%免费】

AI大模型系统学习路线
在面对AI大模型开发领域的复杂与深入,精准学习显得尤为重要。一份系统的技术路线图,不仅能够帮助开发者清晰地了解从入门到精通所需掌握的知识点,还能提供一条高效、有序的学习路径。

但知道是一回事,做又是另一回事,初学者最常遇到的问题主要是理论知识缺乏、资源和工具的限制、模型理解和调试的复杂性,在这基础上,找到高质量的学习资源,不浪费时间、不走弯路,又是重中之重。
AI大模型入门到实战的视频教程+项目包
看视频学习是一种高效、直观、灵活且富有吸引力的学习方式,可以更直观地展示过程,能有效提升学习兴趣和理解力,是现在获取知识的重要途径

光学理论是没用的,要学会跟着一起敲,要动手实操,才能将自己的所学运用到实际当中去,这时候可以搞点实战案例来学习。

海量AI大模型必读的经典书籍(PDF)
阅读AI大模型经典书籍可以帮助读者提高技术水平,开拓视野,掌握核心技术,提高解决问题的能力,同时也可以借鉴他人的经验。对于想要深入学习AI大模型开发的读者来说,阅读经典书籍是非常有必要的。

600+AI大模型报告(实时更新)
这套包含640份报告的合集,涵盖了AI大模型的理论研究、技术实现、行业应用等多个方面。无论您是科研人员、工程师,还是对AI大模型感兴趣的爱好者,这套报告合集都将为您提供宝贵的信息和启示。

AI大模型面试真题+答案解析
我们学习AI大模型必然是想找到高薪的工作,下面这些面试题都是总结当前最新、最热、最高频的面试题,并且每道题都有详细的答案,面试前刷完这套面试题资料,小小offer,不在话下


这份完整版的大模型 AI 学习资料已经上传优快云,朋友们如果需要可以微信扫描下方优快云官方认证二维码免费领取【保证100%免费】

















 2521
2521

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









