




昨天我们已经搭建好了transformer的骨架,有了一个数据流动的容器,接下来我们开始第三阶段:训练基础设施
需要手写训练所需的组件,而不是直接调用库函数:
Cross-Entropy Loss: 手写交叉熵损失函数,注意处理 LogSumExp 的数值稳定性 。
AdamW 优化器: 手写 AdamW 优化算法,包括动量更新和权重衰减逻辑。
学习率调度:实现 Cosine Annealing(余弦退火)学习率调度器,带 Warmup 阶段 。
Checkpointing:实现模型和优化器状态的保存与加载 。
Data Loader: 实现高效的数据加载器,使用 `np.memmap` 处理无法一次性读入内存的大文件 。
1.交叉熵损失
1. 什么是交叉熵损失?
在语言模型中,我们的目标是预测下一个 token。对于每一个位置,模型输出的是一个未归一化的数值向量(Logits),我们需要将其转化为概率,并计算目标单词的概率有多大。
公式通常分为两步:
1.Softmax: 将 Logits 转化为概率 。
2.Negative Log Likelihood (NLL): 计算真实目标 target 的负对数概率。
将两步合并,就得到了 Cross-Entropy Loss 的最终公式:
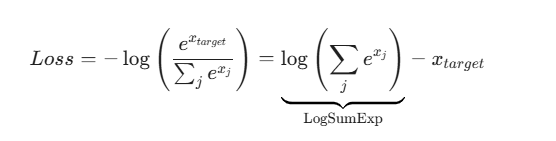
2. 为什么要处理数值稳定性?
看上面公式中的 。
如果 很大(例如 1000),
会在计算机中直接变成
(上溢出),导致 Loss 变成 NaN。
如果 很小(例如 -1000),
会变成 0(下溢出),导致分母为 0。
3. LogSumExp Trick (核心技巧)
为了解决这个问题,利用数学恒等式:

通常取 。
这样做的好处:
-
指数部分变成了
。
-
最大值的项变成了
。
-
其他项都是负数,指数结果在
之间。
-
彻底消除了上溢出问题,且保证了分母至少为 1(不会除以 0)。
PyTorch 代码实现
下面我将从零手写一个带有数值稳定性处理的 Cross-Entropy Loss,并将其与 PyTorch 官方的实现进行对比验证。
import torch
import torch.nn.functional as F
def manual_cross_entropy(logits, target):
"""
手写 Cross Entropy Loss,包含 LogSumExp 技巧。
Args:
logits: 模型的原始输出,形状为 (batch_size, vocab_size)
target: 真实的标签索引,形状为 (batch_size,)
Returns:
loss: 标量损失值
"""
# --- 步骤 1: LogSumExp (数值稳定性处理) ---
# 1.1 找到每一行的最大值 c
# keepdim=True 是为了保持形状为 (batch_size, 1),方便后续广播计算
c, _ = torch.max(logits, dim=1, keepdim=True)
# 1.2 将 logits 减去最大值,防止 exp 溢出
logits_shifted = logits - c
# 1.3 计算 exp
exp_logits = torch.exp(logits_shifted)
# 1.4 求和
sum_exp = torch.sum(exp_logits, dim=1, keepdim=True)
# 1.5 取对数,并加回 c
# log_sum_exp 的形状是 (batch_size, 1)
log_sum_exp = torch.log(sum_exp) + c
# --- 步骤 2: 获取目标 target 对应的 logits ---
# 我们需要从 logits 中取出 target 索引对应的那个值。
# logits 形状: (B, V), target 形状: (B)
# gather 需要 index 和 input 维度一致,所以先把 target 变成 (B, 1)
target_logits = logits.gather(dim=1, index=target.unsqueeze(1))
# --- 步骤 3: 计算 Loss ---
# 公式: Loss = LogSumExp - x_target
# 此时 loss_per_sample 形状为 (batch_size, 1)
loss_per_sample = log_sum_exp - target_logits
# --- 步骤 4: 求平均 ---
return loss_per_sample.mean()
# ================= 验证环节 =================
# 模拟数据:Batch size = 2, Vocab size = 5
batch_size = 2
vocab_size = 5
# 随机生成 logits (模拟模型输出)
fake_logits = torch.randn(batch_size, vocab_size, requires_grad=True)
# 随机生成 target (模拟真实标签)
fake_target = torch.randint(0, vocab_size, (batch_size,))
print(f"Logits:\n{fake_logits}")
print(f"Target indices: {fake_target}")
# 1. 调用我们手写的函数
my_loss = manual_cross_entropy(fake_logits, fake_target)
print(f"\n我的 Loss: {my_loss.item():.6f}")
# 2. 调用 PyTorch 官方函数
# PyTorch 的 CrossEntropyLoss 内部自动做了 LogSoftmax + NLLLoss,也处理了数值稳定性
torch_loss = F.cross_entropy(fake_logits, fake_target)
print(f"官方 Loss: {torch_loss.item():.6f}")
# 3. 检查是否一致
assert torch.allclose(my_loss, torch_loss), "报错:两者结果不一致!"
print("\n✅ 验证通过。")
2.Adamw优化器:
1. 为什么我们需要 AdamW?
我们都知道,在标准的随机梯度下降(SGD)中,L2 正则化(在损失函数中加 )和权重衰减(在更新参数时减去
)在数学上是等价的。
但是在 Adam 中,它们不等价。
-
Adam 的问题:Adam 会根据梯度的二阶矩(
,即梯度的平方)来调整每个参数的学习率。如果你使用 L2 正则化,正则项的梯度会被加入到
中,然后被放入
和
-
AdamW 的解决:Decoupled Weight Decay(解耦权重衰减)。AdamW 将权重衰减从梯度更新的过程中剥离出来。它照常计算 Adam 的动量和自适应步长,但在最后更新参数的一瞬间,直接对参数进行一次衰减。
2. AdamW 的数学公式
这是我们需要实现的目标逻辑:
-
梯度计算:
-
动量更新 (1st Moment):
-
二阶矩更新 (2nd Moment):
-
偏差修正 (Bias Correction):
-
参数更新 (核心区别):
注意公式最后一部分: 是直接加在更新项里的(或者说直接从权重中减去),并没有除以
。这就是解耦。
手写 PyTorch 实现 AdamW
import torch
from torch.optim import Optimizer
import math
class MyAdamW(Optimizer):
def __init__(self, params, lr=1e-3, betas=(0.9, 0.999), eps=1e-8, weight_decay=1e-2):
"""
初始化 AdamW 优化器
Args:
params: 待优化的参数 (通常是 model.parameters())
lr: 学习率 (Learning Rate, 也就是公式中的 eta)
betas: 包含两个系数的元组 (beta1, beta2),用于控制动量和二阶矩的衰减
eps: 一个极小值,防止分母为 0
weight_decay: 权重衰减系数 (lambda)
"""
# 1. 检查参数合法性 (这也是 PyTorch 源码的标准做法)
if not 0.0 <= lr:
raise ValueError(f"Invalid learning rate: {lr}")
if not 0.0 <= eps:
raise ValueError(f"Invalid epsilon value: {eps}")
if not 0.0 <= betas[0] < 1.0:
raise ValueError(f"Invalid beta parameter at index 0: {betas[0]}")
if not 0.0 <= betas[1] < 1.0:
raise ValueError(f"Invalid beta parameter at index 1: {betas[1]}")
if not 0.0 <= weight_decay:
raise ValueError(f"Invalid weight_decay value: {weight_decay}")
# 2. 将超参数打包成一个字典,称为 'defaults'
defaults = dict(lr=lr, betas=betas, eps=eps, weight_decay=weight_decay)
# 3. 调用父类 Optimizer 的初始化
# 这步操作会将 params 分组管理,虽然我们通常只有一个组
super(MyAdamW, self).__init__(params, defaults)
这是优化器最关键的方法。每次调用 optimizer.step() 时,就会执行这里的代码。
请仔细看每一行注释,我将动量更新和权重衰减的逻辑完全拆解了。
def step(self, closure=None):
"""
执行一步参数更新
"""
loss = None
if closure is not None:
loss = closure()
# 遍历每一个参数组 (param_group)
# 大多数情况下,你只有一个组,包含了模型的所有参数
for group in self.param_groups:
# 获取该组的超参数
beta1, beta2 = group['betas']
weight_decay = group['weight_decay']
lr = group['lr']
eps = group['eps']
# 遍历该组中的每一个参数 (parameter)
for p in group['params']:
# 如果参数没有梯度 (grad is None),则跳过
if p.grad is None:
continue
# 获取当前的梯度数据
grad = p.grad.data
# --- 状态管理 (State) ---
# 优化器需要记住上一步的动量(m)和二阶矩(v),这些存储在 self.state 中
state = self.state[p]
# 如果是第一次运行 (step 0),需要初始化 m 和 v 为全 0 张量
if len(state) == 0:
state['step'] = 0
# m_0: 指数移动平均的梯度 (Momentum)
state['exp_avg'] = torch.zeros_like(p.data)
# v_0: 指数移动平均的梯度平方 (Variance)
state['exp_avg_sq'] = torch.zeros_like(p.data)
# 取出 m 和 v
exp_avg = state['exp_avg']
exp_avg_sq = state['exp_avg_sq']
state['step'] += 1
# --- 逻辑 1: 权重衰减 (Weight Decay) 的解耦实现 ---
# 在 AdamW 中,权重衰减通常先于梯度更新执行,或者独立执行。
# 公式: theta = theta - lr * lambda * theta
if weight_decay != 0:
# p.data.mul_(scalar) 是原地乘法操作
p.data.mul_(1 - lr * weight_decay)
# --- 逻辑 2: 更新动量 (Momentum / 1st Moment) ---
# 公式: m_t = beta1 * m_{t-1} + (1 - beta1) * g_t
exp_avg.mul_(beta1).add_(grad, alpha=1 - beta1)
# --- 逻辑 3: 更新二阶矩 (Variance / 2nd Moment) ---
# 公式: v_t = beta2 * v_{t-1} + (1 - beta2) * (g_t ^ 2)
# addcmul_ 意味着: output = output + alpha * (tensor1 * tensor2)
exp_avg_sq.mul_(beta2).addcmul_(grad, grad, value=1 - beta2)
# --- 逻辑 4: 偏差修正 (Bias Correction) ---
# 因为 m 和 v 初始化为 0,在初期会偏向 0,需要放大回来
bias_correction1 = 1 - beta1 ** state['step']
bias_correction2 = 1 - beta2 ** state['step']
# 计算分母: sqrt(v_t_hat) + eps
# 这里为了计算效率,我们直接操作数值
# 真实的 step size = lr / bias_correction1
step_size = lr / bias_correction1
denom = (exp_avg_sq.sqrt() / math.sqrt(bias_correction2)).add_(eps)
# --- 逻辑 5: 参数更新 ---
# 公式: theta = theta - step_size * (m_t / denom)
# 注意:这里的 theta 已经是被 Weight Decay 衰减过的了
p.data.addcdiv_(exp_avg, denom, value=-step_size)
return loss
3.学习率调度
需要设计一种策略,让模型在训练初期先缓慢“热身”(Warmup),然后把学习率提高,接着随着训练的进行,用一种像余弦波浪一样的曲线(Cosine Annealing)慢慢降低学习率,直到训练结束。
一、 什么是学习率调度 (Learning Rate Scheduling)?
想象你在山上(初始状态),你的目标是下到山谷的最低点(损失函数 Loss 最小的地方)。“学习率”就是你下山时迈出的步长。
-
如果不调度(固定学习率):
-
步子太大:你可能会直接跨过最低点,在山谷两边反复横跳,永远下不去(无法收敛)。
-
步子太小:你走得太慢,天黑了还没走到山脚(训练时间过长,或者卡在半山腰的小坑里)。
-
-
学习率调度:
-
这就是根据时间调整你的步长。通常的策略是:刚开始步子大一点以便快速下山,越接近谷底,步子越小,以便精准地停在最低点。
-
二、 什么是 Warmup + Cosine Annealing?
这种策略是目前训练大模型(如 Transformer, BERT, GPT)和许多计算机视觉模型的标配。它结合了两个阶段:
1. Warmup 阶段(热身)
-
动作: 在训练开始的前几轮(Epoch),学习率从 0慢慢线性增加到预设的 最大学习率。
-
为什么要这样做?
-
模型刚开始训练时,参数是随机初始化的,对数据一无所知。
-
这时候如果学习率太大(步子迈太大),模型会根据第一批数据剧烈震荡,导致参数乱飞,甚至直接导致训练崩溃(NaN)。
-
Warmup 就像运动员热身,先让模型慢慢适应数据,稳定下来。
-
2. Cosine Annealing 阶段(余弦退火)
-
动作: 热身结束后,学习率开始下降。但不是像下楼梯一样突然下降,而是沿着 余弦函数(Cosine Function) 的曲线,平滑、缓慢地下降到 0(或一个极小值)。
-
为什么要这样做?
-
余弦曲线在刚开始下降时比较慢,中间快,最后又变慢。
-
这种平滑的下降方式通常能比阶梯式下降(Step Decay)找到更好的模型参数,因为它保留了较高的学习率更长时间,有机会跳出局部的坏坑(Local Minima)。
-
我们将使用 PyTorch 来实现这个功能。为了方便你理解,我使用了 PyTorch 官方推荐的组合方式:LinearLR (用于 Warmup) + CosineAnnealingLR (用于退火),并通过 SequentialLR 把它们串联起来。
import torch
import torch.nn as nn
import torch.optim as optim
from torch.optim.lr_scheduler import LinearLR, CosineAnnealingLR, SequentialLR
import matplotlib.pyplot as plt
# 1. 设置一些基本参数
# -------------------------
initial_lr = 0.1 # 我们的目标最大学习率
total_epochs = 100 # 总共训练多少轮
warmup_epochs = 10 # 前10轮用于热身
# 2. 创建一个虚拟模型和优化器
# -------------------------
# 我们这里不需要真的训练模型,只需要优化器来模拟学习率的变化
model = nn.Linear(10, 1)
optimizer = optim.SGD(model.parameters(), lr=initial_lr)
# 3. 定义调度器 (Schedulers)
# -------------------------
# 阶段 A: Warmup 调度器
# start_factor=0.01 表示从 0.01 * initial_lr 开始
# end_factor=1.0 表示结束时达到 1.0 * initial_lr
# total_iters=warmup_epochs 表示这个过程持续多少轮
scheduler_warmup = LinearLR(
optimizer,
start_factor=0.01,
end_factor=1.0,
total_iters=warmup_epochs
)
# 阶段 B: Cosine Annealing 调度器
# T_max 是退火阶段的长度(总轮数 - 热身轮数)
# eta_min 是最后降到的最低学习率(通常为0)
scheduler_cosine = CosineAnnealingLR(
optimizer,
T_max=total_epochs - warmup_epochs,
eta_min=0
)
# 阶段 C: 把它们串联起来
# milestones=[warmup_epochs] 意思是:到了第10轮,就从 Warmup 切换到 Cosine
scheduler = SequentialLR(
optimizer,
schedulers=[scheduler_warmup, scheduler_cosine],
milestones=[warmup_epochs]
)
# 4. 模拟训练过程并记录学习率
# -------------------------
lrs = [] # 用来保存每一轮的学习率,方便画图
print("开始模拟训练...")
for epoch in range(total_epochs):
# 获取当前的学习率
current_lr = optimizer.param_groups[0]['lr']
lrs.append(current_lr)
# 模拟一步优化器更新 (optimizer.step)
# 在真实代码中,这里会有 loss.backward()
optimizer.step()
# 更新学习率 (这是关键!每轮结束都要调用)
scheduler.step()
print("模拟结束。")
# 5. 可视化 (如果运行这段代码,你会看到一条曲线)
# -------------------------
# 这是一个上升再下降的曲线
plt.figure(figsize=(10, 5))
plt.plot(lrs, label='Learning Rate')
plt.title('Cosine Annealing with Warmup')
plt.xlabel('Epoch')
plt.ylabel('Learning Rate')
plt.axvline(x=warmup_epochs, color='r', linestyle='--', label='End of Warmup') # 画一条红线标记热身结束
plt.legend()
plt.grid(True)
plt.show()
4.Checkpointing(检查点机制)
一、 核心概念:我们需要存什么?
新手往往以为只需要保存“模型参数”(Model Weights)。但这是一个误区。如果你想完美地“断点续传”,你需要保存整个训练现场的信息。
这就好比你存档游戏时,不仅要保存角色的属性(模型参数),还要保存角色的位置(训练轮数)、背包里的道具(优化器状态)等。
通常我们需要在一个 Python 字典(Dictionary)里打包以下内容:
-
model_state_dict: 模型的参数(权重和偏置)。 -
optimizer_state_dict: (非常重要) 优化器的状态。-
为什么? 还记得我们刚才学的“动量”吗?优化器会记住之前的梯度方向。如果你不存这个,恢复训练时优化器就会“失忆”,导致训练曲线剧烈波动。
-
-
scheduler_state_dict: (非常重要) 学习率调度器的状态。-
为什么? 如果你用了 Cosine Annealing,不存这个,恢复训练时学习率会重置回初始的大数值,破坏已经收敛的模型。
-
-
epoch: 当前训练到了第几轮(为了知道从哪里继续)。 -
loss: 当前的损失值(用于记录和对比)。
我们将实现两个核心函数:save_checkpoint(存档)和 load_checkpoint(读档)。
import torch
import torch.nn as nn
import torch.optim as optim
import os # 用于处理文件路径
# 定义一个简单的玩具模型
class SimpleModel(nn.Module):
def __init__(self):
super(SimpleModel, self).__init__()
self.fc = nn.Linear(10, 1)
def forward(self, x):
return self.fc(x)
# 初始化组件
model = SimpleModel()
optimizer = optim.Adam(model.parameters(), lr=0.001)
这个函数负责把内存里的状态打包,写入硬盘。
def save_checkpoint(state, filename="my_checkpoint.pth.tar"):
"""
保存检查点
:param state: 一个字典,包含模型、优化器等所有状态
:param filename: 保存的文件名,通常以 .pth 或 .pt 结尾
"""
print("=> 正在保存 Checkpoint...")
torch.save(state, filename)
print(f"=> 保存成功: {filename}")
# --- 模拟使用场景 ---
# 假设现在是第 5 轮训练结束
current_epoch = 5
current_loss = 0.35
# 打包我们需要保存的所有东西
checkpoint = {
"state_dict": model.state_dict(), # 模型参数
"optimizer": optimizer.state_dict(), # 优化器记忆
"epoch": current_epoch, # 当前轮数
"loss": current_loss # 当前Loss
}
# 调用函数保存
save_checkpoint(checkpoint)
这个函数负责从硬盘读取文件,并把状态恢复到模型和优化器中。
def load_checkpoint(checkpoint_file, model, optimizer):
"""
加载检查点
:param checkpoint_file: 存档文件的路径
:param model: 需要恢复的模型实例
:param optimizer: 需要恢复的优化器实例
:return: 恢复后的起始轮数 (start_epoch)
"""
print(f"=> 正在加载 Checkpoint: {checkpoint_file} ...")
# 1. 加载文件到内存
# map_location='cpu' 意思是如果之前是用GPU存的,现在强制加载到CPU上(防止报错)
# 如果你在GPU上跑,可以去掉 map_location
checkpoint = torch.load(checkpoint_file, map_location='cpu')
# 2. 恢复模型参数
model.load_state_dict(checkpoint["state_dict"])
# 3. 恢复优化器状态 (这就恢复了动量等信息)
optimizer.load_state_dict(checkpoint["optimizer"])
# 4. 获取之前的轮数,以便我们要知道从第几轮开始继续
start_epoch = checkpoint["epoch"] + 1
# 5. 获取之前的 loss (可选,用于打印)
previous_loss = checkpoint["loss"]
print(f"=> 加载完成!将从第 {start_epoch} 轮继续训练 (上次 Loss: {previous_loss})")
return start_epoch
# --- 模拟:程序重新启动了 ---
# 1. 重新实例化全新的模型和优化器 (此时它们是初始状态,什么都没学到)
new_model = SimpleModel()
new_optimizer = optim.Adam(new_model.parameters(), lr=0.001)
# 2. 尝试加载存档
checkpoint_path = "my_checkpoint.pth.tar"
start_epoch = 0 # 默认从0开始
# 检查文件是否存在
if os.path.exists(checkpoint_path):
# 如果存在存档,就覆盖当前的模型和优化器,并更新 start_epoch
start_epoch = load_checkpoint(checkpoint_path, new_model, new_optimizer)
else:
print("=> 没有发现存档,从头开始训练")
# 3. 继续训练循环
total_epochs = 10
print(f"\n开始训练循环,从 Epoch {start_epoch} 到 {total_epochs}")
for epoch in range(start_epoch, total_epochs):
# ... 这里执行你的训练代码 (Forward, Backward, Step) ...
print(f"正在训练 Epoch {epoch} ...")
# 假设每轮结束我们都存一次档
# 这样如果程序在 Epoch 7 崩溃,下次就能从 Epoch 7 继续
checkpoint = {
"state_dict": new_model.state_dict(),
"optimizer": new_optimizer.state_dict(),
"epoch": epoch,
"loss": 0.123 # 假装这是当前的loss
}
save_checkpoint(checkpoint)
5.data loader
核心概念:什么是 np.memmap?
把它想象成一个“滑动窗口”。
-
普通读取:把你家里的所有书(数据)都搬到书桌(内存)上。如果书太多,桌子就塌了。
-
内存映射:书还是放在书架(硬盘)上。你只把你需要读的那一页(数据片段)拿到了桌子上。
下面我将分步实现一个基于 PyTorch 的高效数据加载器。
第一步:准备模拟数据
为了演示,我们先创建一个比较大的二进制文件保存在硬盘上。
import numpy as np
import os
# 1. 定义文件名和数据大小
filename = 'large_dataset.bin'
num_samples = 10000 # 假设有 1万 个样本
feature_dim = 256 # 每个样本有 256 个特征
dtype = 'float32' # 数据类型
# 2. 生成一些随机数据
print(f"正在生成数据: {num_samples} x {feature_dim} ...")
data = np.random.randn(num_samples, feature_dim).astype(dtype)
# 3. 将数据写入硬盘 (使用 memmap 的写入模式 'w+')
# 这里我们创建一个内存映射文件,用来写入数据
fp = np.memmap(filename, dtype=dtype, mode='w+', shape=(num_samples, feature_dim))
fp[:] = data[:] # 将内存中的随机数据写入硬盘映射区
fp.flush() # 确保数据写入磁盘
# 删除内存中的 data 变量,模拟我们现在只有硬盘上的文件
del data, fp
print(f"文件 '{filename}' 已创建完毕。")
第二步:实现 Dataset 类 (核心部分)
这是最关键的一步。我们将继承 PyTorch 的 Dataset 类,并使用 np.memmap 以只读模式打开文件。
import torch
from torch.utils.data import Dataset
class MemmapDataset(Dataset):
def __init__(self, filename, shape, dtype='float32'):
"""
初始化函数:在这里我们只建立映射,不加载数据。
"""
self.filename = filename
self.shape = shape
self.dtype = dtype
# 关键点:使用 mode='r' (只读模式)
# 这行代码几乎瞬间完成,因为它只是建立了文件和内存的链接,
# 并没有真正把几百 GB 的数据读进来。
self.data = np.memmap(
self.filename,
dtype=self.dtype,
mode='r',
shape=self.shape
)
def __len__(self):
"""
告诉 PyTorch 数据集一共有多少个样本。
"""
# shape[0] 是样本数量 (10000)
return self.shape[0]
def __getitem__(self, index):
"""
获取单个样本:只有在这里,数据才真正从硬盘被读取到内存。
"""
# 1. 从 memmap 中切片读取一行数据
# 这一步就像在普通的 numpy 数组中取值一样简单
sample = self.data[index]
# 2. 将 numpy 数组转换为 PyTorch 张量 (Tensor)
# 为了避免数据拷贝,通常 copy=True 比较安全,但这里为了演示直接转换
tensor_sample = torch.from_numpy(sample)
return tensor_sample
第三步:使用 DataLoader 加载数据
现在我们有了 Dataset,接下来用 DataLoader 来进行批量读取、打乱顺序等操作。
from torch.utils.data import DataLoader
# 1. 实例化我们的数据集
# 注意:在实际项目中,你需要知道数据的 shape。
# 通常我们会把 shape 信息单独存在一个元数据文件(json/txt)里。
dataset = MemmapDataset(
filename='large_dataset.bin',
shape=(10000, 256),
dtype='float32'
)
# 2. 创建 DataLoader
# batch_size=32: 每次训练给模型喂 32 个样本
# shuffle=True: 每个 epoch 开始时打乱数据顺序
# num_workers=2: 使用 2 个子进程并行加载数据 (加速读取)
dataloader = DataLoader(
dataset,
batch_size=32,
shuffle=True,
num_workers=2
)
# 3. 模拟训练循环
print("开始模拟训练循环...")
for i, batch in enumerate(dataloader):
# batch 是一个形状为 [32, 256] 的 Tensor
# 在这里,数据已经从硬盘读入内存,并被整理成了 Batch
# [此处可以是你的模型前向传播代码]
# output = model(batch)
if i < 3: # 只打印前3个batch演示一下
print(f"Batch {i}: 形状 {batch.shape}, 数据类型 {batch.dtype}")
else:
break
print("演示结束。")
# 清理生成的临时文件
import os
try:
# 关闭 memmap 对象以释放文件句柄
del dataset.data
os.remove('large_dataset.bin')
print("临时文件已清理。")
except PermissionError:
print("无法删除文件,可能仍被占用。")
为什么这样做最高效?
-
极低的内存占用:哪怕文件有 1TB,你的 Python 进程可能只占用了几百 MB 内存(仅包含当前的 Batch 数据)。
-
操作系统级优化:
np.memmap利用了操作系统的虚拟内存机制(Virtual Memory)。如果你的 RAM 还有空闲,操作系统会自动把频繁读取的硬盘数据缓存到 RAM 里(Page Cache),下次读取会飞快。 -
支持并行:配合
DataLoader的num_workers,可以让 CPU 在训练模型的同时,预先从硬盘把下一批数据读取好。

















 709
709

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









