







PID控制后两轮电机
PID是比例积分微分控制算法,再反馈调节的作用保持系统的稳定,在差速系统中主要运用他来进行两路电机的速度匹配,能够实现直线行驶的稳定。
ackermann转向模型
设定整体速度为V,车身长L和宽B,预定前轮角度为90-a
参考文章 阿克曼集团 - ROS Wiki --- Ackermann Group - ROS Wiki
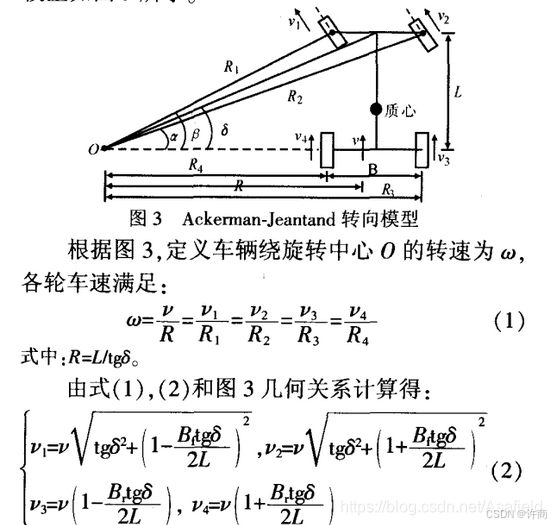
对于使用模型应用到实际目标计算过程发现假定了前两轮角度始终相同,为平行的阿克曼转向。
对于tana的大小需自己推算。
PID是比例积分微分控制算法,再反馈调节的作用保持系统的稳定,在差速系统中主要运用他来进行两路电机的速度匹配,能够实现直线行驶的稳定。
设定整体速度为V,车身长L和宽B,预定前轮角度为90-a
参考文章 阿克曼集团 - ROS Wiki --- Ackermann Group - ROS Wiki
对于使用模型应用到实际目标计算过程发现假定了前两轮角度始终相同,为平行的阿克曼转向。
对于tana的大小需自己推算。
 1万+
2709
1万+
2709

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























