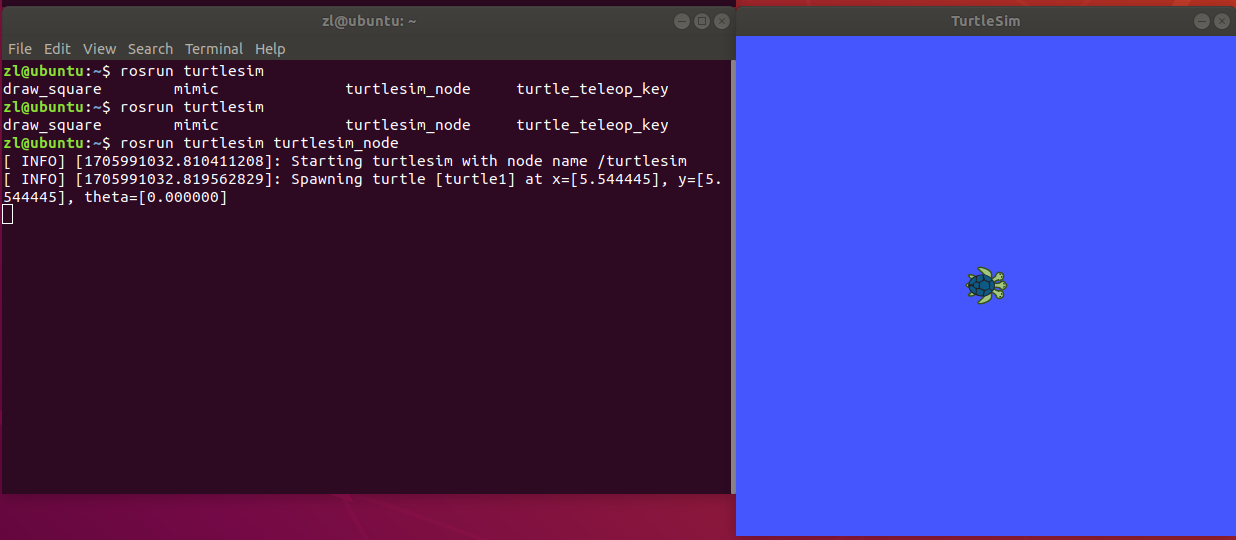
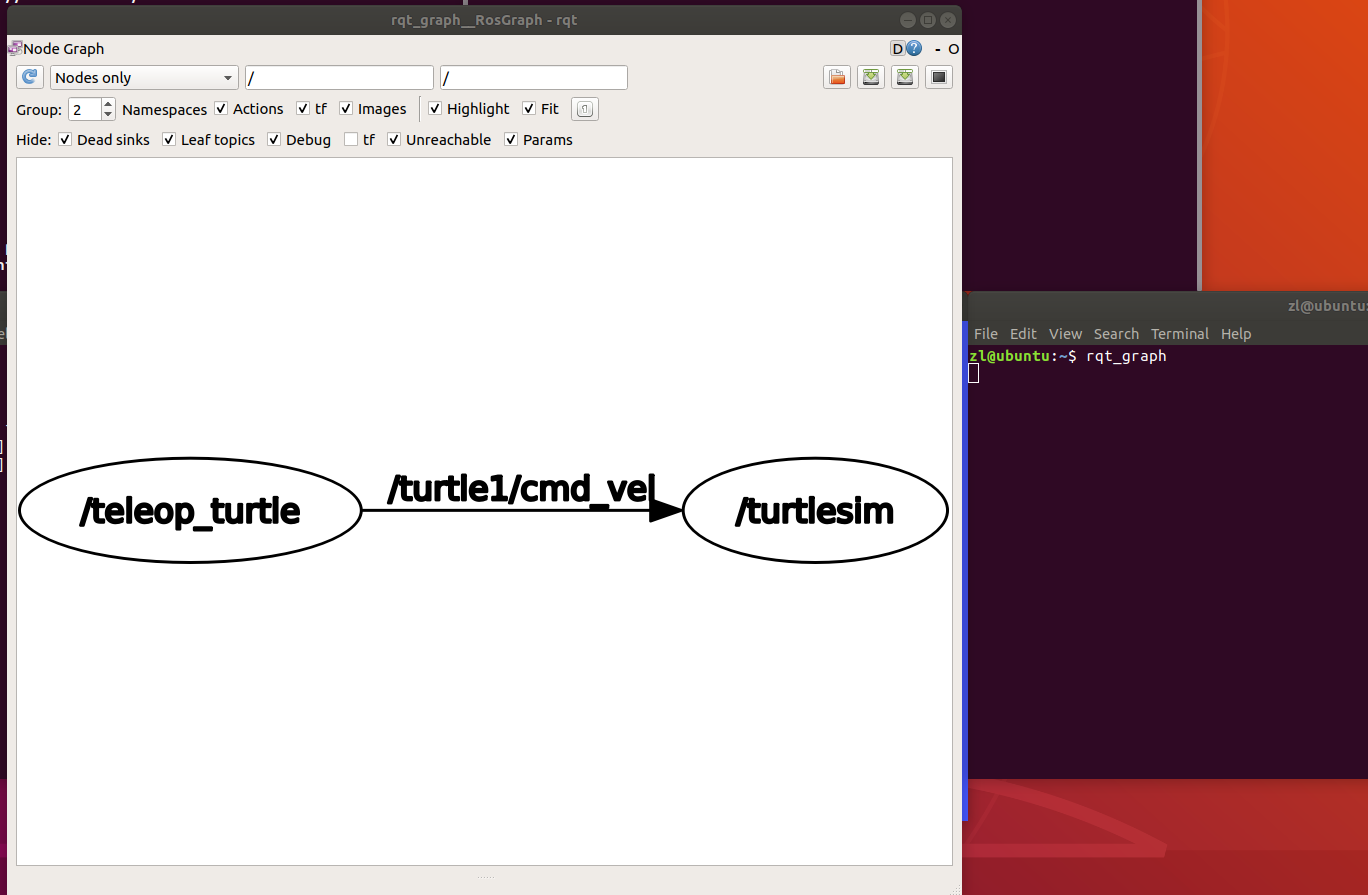
ROS 入门教程:小乌龟仿真器和基础操作 第一步:运行小乌龟仿真器 roscore rosrun turtlesim turtlesim_node 这种命令可以按Tab键补齐和提示 rosrun turtlesim turtle_teleop_key 这样就可以通过键盘的上下左右键控制乌龟的运动 如果我们想要了解背后的原理,我们可以通过一系列的ros工具进行分析。 第二步:了解背后原理的基本操作 rqt_graph #可以观察系统的运算图 可以通过该工具查看ros中工作的节点,其中/teleop_turtle是键盘控制节点,turtlesim是仿真器节点,这两个节点之间有话题进行通讯








 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1771
1771

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言






