




带滤波器的PID控制是一种在经典PID控制的基础上加入滤波器机制的方法,主要目的是减少系统中高频噪声对控制器性能的影响,尤其是对微分环节的优化,使系统更平稳且更加抗干扰。
带滤波器的PID控制原理
PID控制中的微分项对高频噪声非常敏感,因此常通过添加滤波器来降低高频成分对微分计算的影响。滤波器一般是低通滤波器,用来衰减高频噪声的幅值,同时尽可能保留低频信号。
带滤波器的PID控制公式如下:
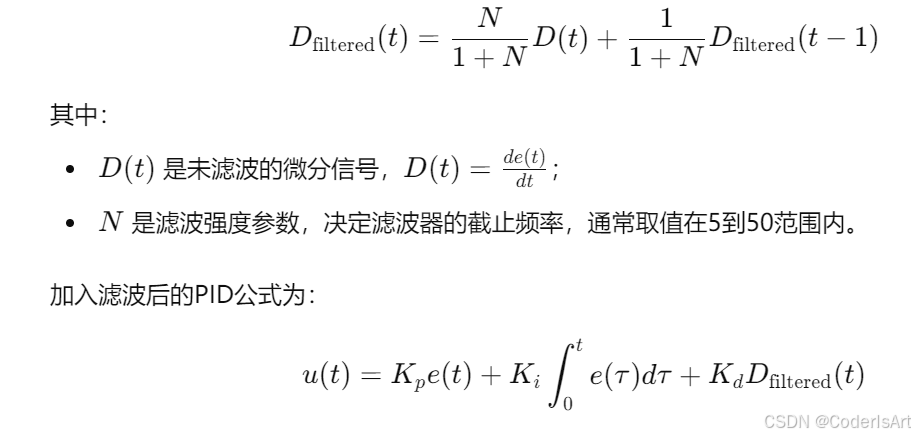
一阶低通滤波器的微分改进
最常用的是一阶低通滤波器,公式为:
伪代码实现
以下是一个带滤波器的PID控制器的伪代码:
class PIDWithFilter:
def __init__(self, Kp, Ki, Kd, N, dt):
self.Kp = Kp
self.Ki = Ki
self.Kd = Kd
self.N = N # 滤波参数
self.dt = dt # 采样时间
self.prev_error = 0
self.integral = 0
self.D_filtered = 0 # 初始滤波后的微分项
def compute(self, error):
# 比例项
P = self.Kp * e 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 982
982

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









