




 本文深入探讨了Pyramid Stereo Matching Network的论文思想,包括使用ResNet进行特征提取,通过dilated convolution扩大感受野,以及利用Pyramid Pooling Module获取全局上下文信息。文章还详细介绍了构建feature volume的过程,以及如何使用stacked hourglass 3D CNN处理cost volume,并结合不同的hourglass输出计算加权损失。此外,论文中采用了end-to-end的立体估计方法,并在KITTI数据集上取得了最佳成果。笔记部分则涵盖了视差计算的回归方法和应用smooth_l1_loss作为损失函数的原因。
本文深入探讨了Pyramid Stereo Matching Network的论文思想,包括使用ResNet进行特征提取,通过dilated convolution扩大感受野,以及利用Pyramid Pooling Module获取全局上下文信息。文章还详细介绍了构建feature volume的过程,以及如何使用stacked hourglass 3D CNN处理cost volume,并结合不同的hourglass输出计算加权损失。此外,论文中采用了end-to-end的立体估计方法,并在KITTI数据集上取得了最佳成果。笔记部分则涵盖了视差计算的回归方法和应用smooth_l1_loss作为损失函数的原因。
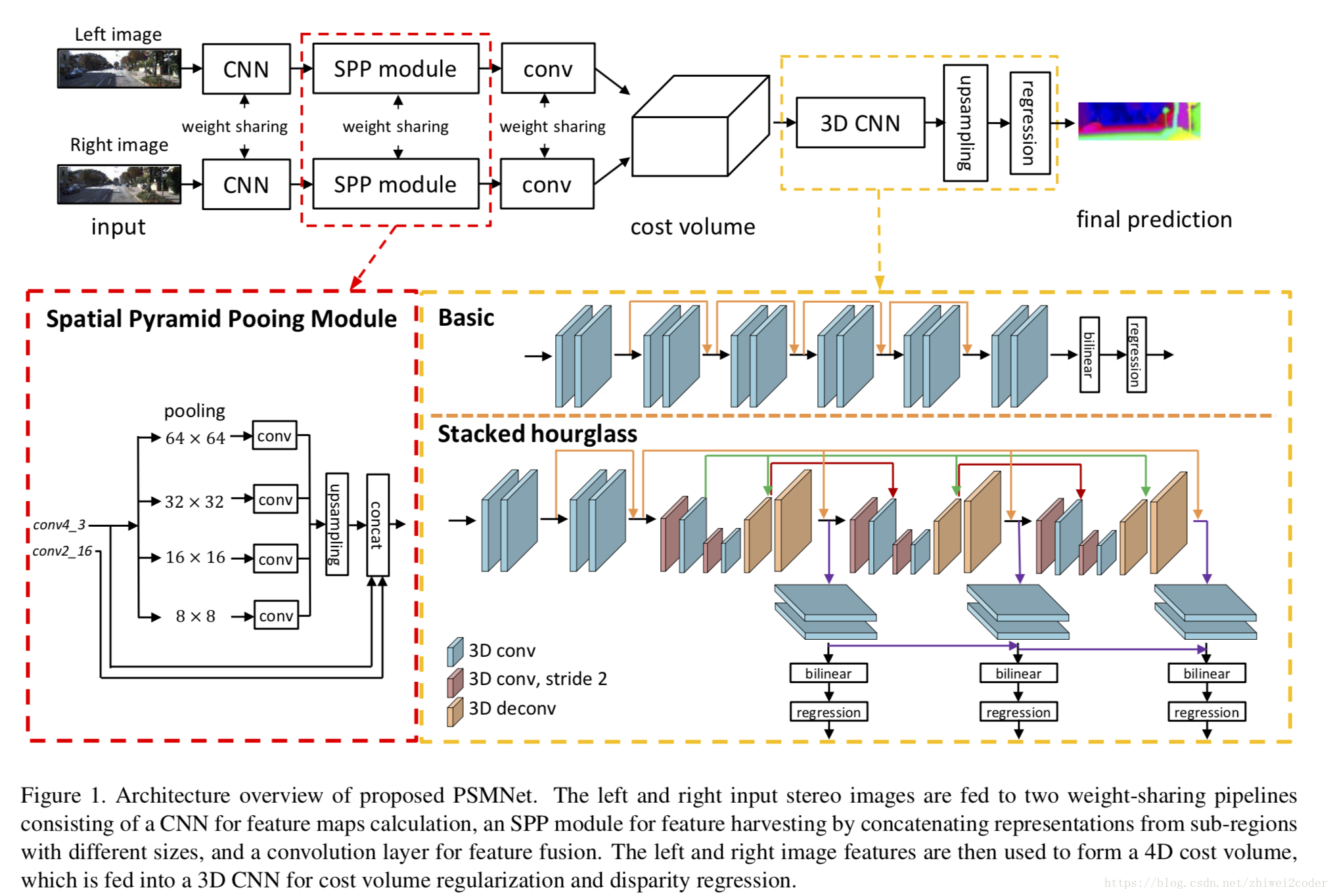
论文思想
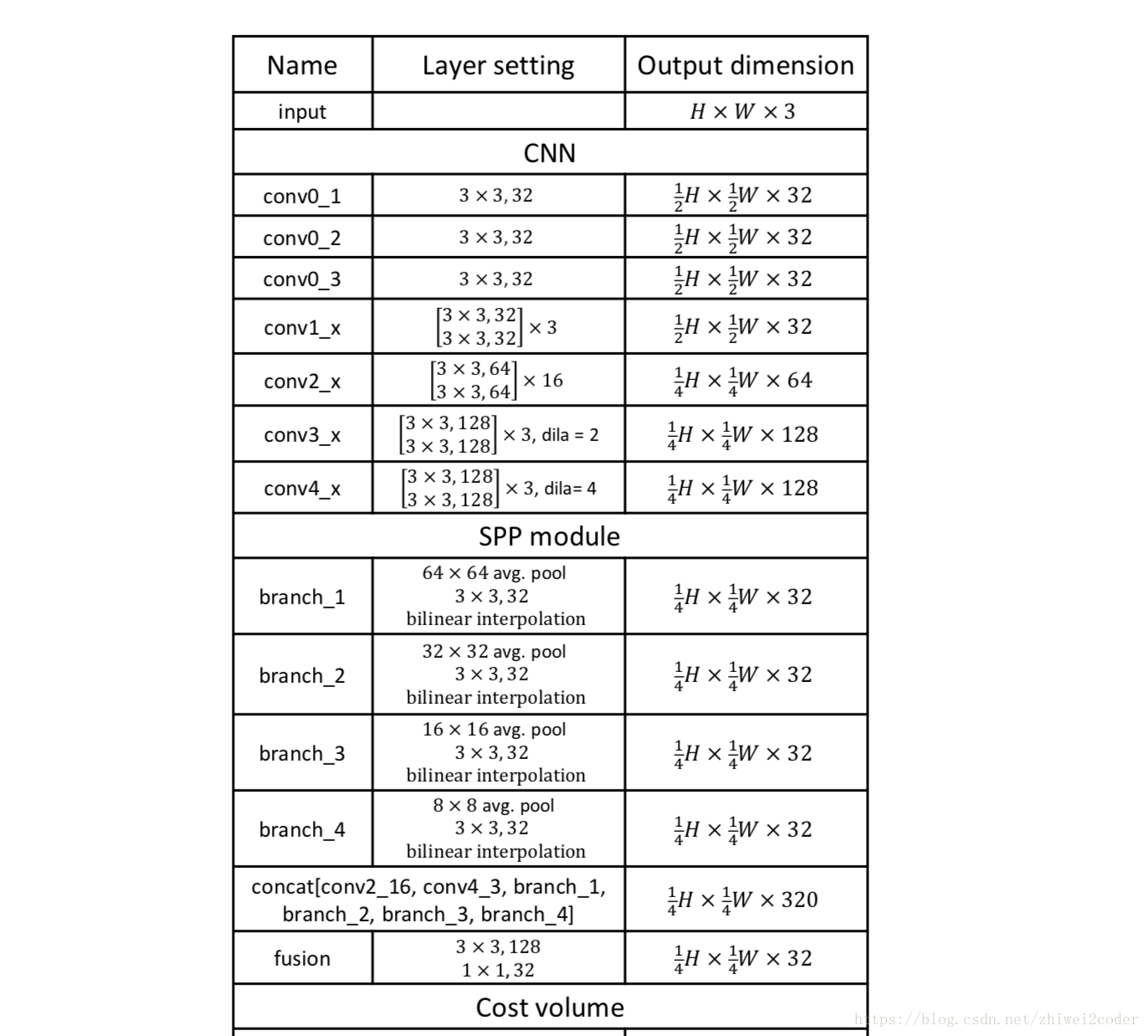
- 使用ResNet提取特征
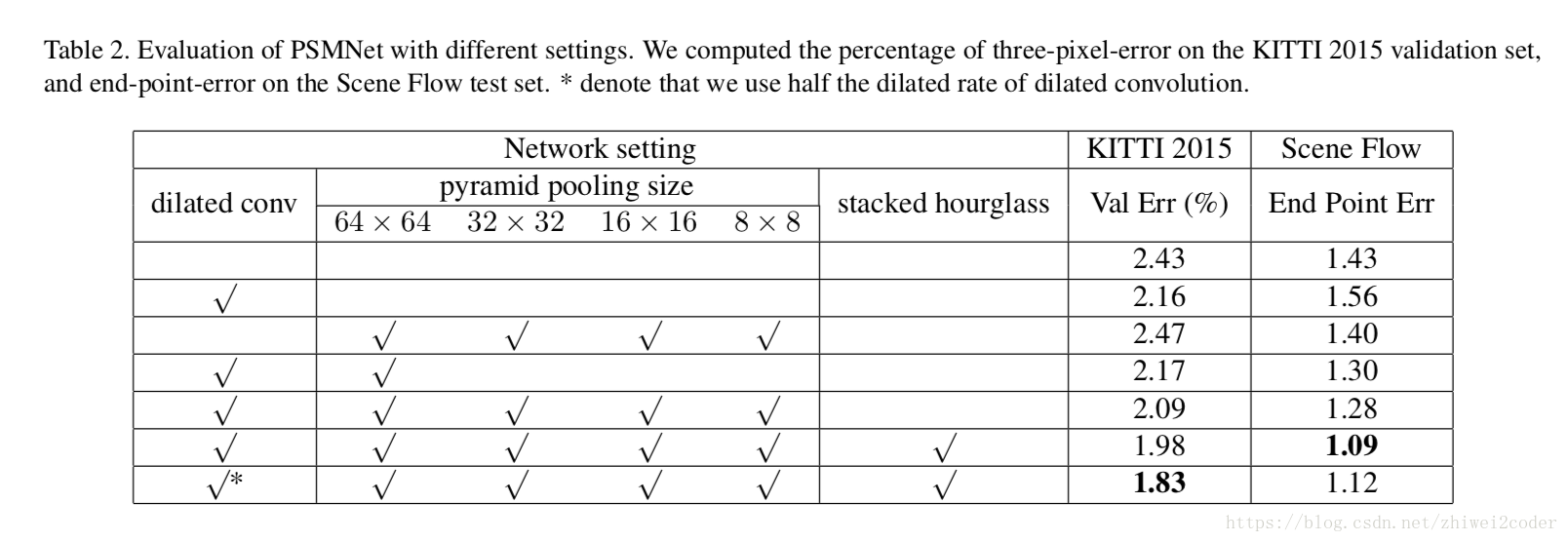
- 用dilated convolution增大感受野
- 用Pyramid pooling module,提取各个scale的特征,使之包含global的context信息
- 用feature volume shift构建volume
- 用stacked hourglass 3D CNN(encoder-decoder)来处理cost volume,在训练过程中使用不同层级的hourglass的输出算加权loss
- end-to-end stereo estimation
- 在KITTI上取得了当时最好的结果
笔记
结构
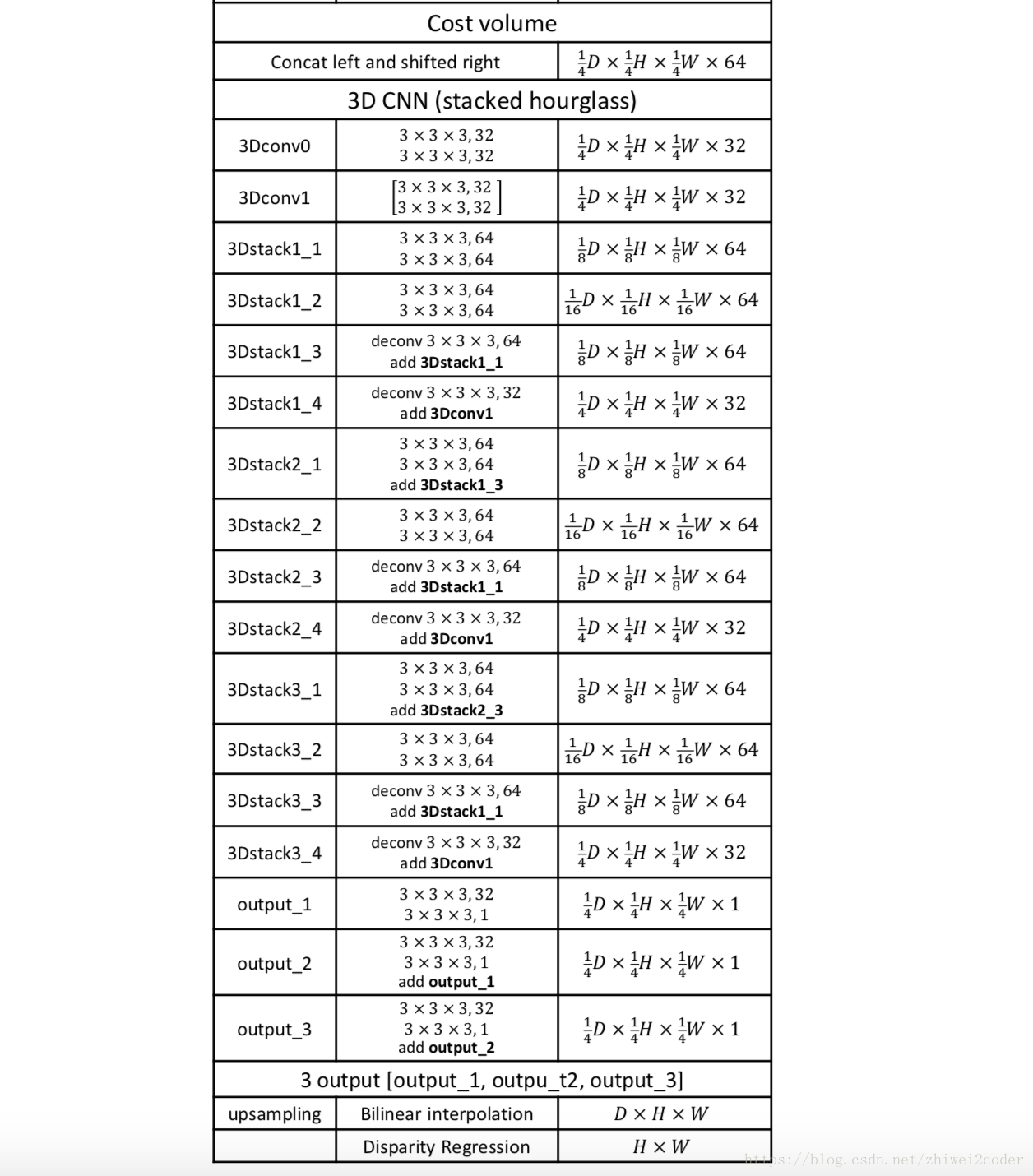
视差计算(回归方法)
DIsparity regression
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 4576
4576

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









