






 本文详细介绍STM32F103在CAN总线的应用,包括硬件配置、波特率设置、中断配置及代码实现。通过实例演示STM32F103如何实现CAN数据的发送与接收。
本文详细介绍STM32F103在CAN总线的应用,包括硬件配置、波特率设置、中断配置及代码实现。通过实例演示STM32F103如何实现CAN数据的发送与接收。
前言
CAN 是Controller Area Network 的缩写(以下称为CAN),是ISO国际标准化的串行通信协议。在汽车产业中,出于对安全性、舒适性、方便性、低公害、低成本的要求,各种各样的电子控制系统被开发了出来。由于这些系统之间通信所用的数据类型及对可靠性的要求不尽相同,由多条总线构成的情况很多,线束的数量也随之增加。为适应“减少线束的数量”、“通过多个LAN,进行大量数据的高速通信”的需要,1986 年德国电气商博世公司开发出面向汽车的CAN 通信协议。此后,CAN 通过ISO11898 及ISO11519 进行了标准化,在欧洲已是汽车网络的标准协议。
CAN 的高性能和可靠性已被认同,并被广泛地应用于工业自动化、船舶、医疗设备、工业设备等方面。现场总线是当今自动化领域技术发展的热点之一,被誉为自动化领域的计算机局域网。它的出现为分布式控制系统实现各节点之间实时、可靠的数据通信提供了强有力的技术支持。
CAN属于现场总线的范畴,它是一种有效支持分布式控制或实时控制的串行通信网络。较之许多RS-485基于R线构建的分布式控制系统而言,基于CAN总线的分布式控制系统在以下方面具有明显的优越性:
- 网络各节点之间的数据通信实时性强
- 开发周期短
- 已形成国际标准的现场总线
- 最有前途的现场总线之一
更多关于can持术细节(如仲载,报文格式,标准帧,扩展帧等可查看相关技术文档或直接查看STM32F103数据手册CAN接口介绍篇),本文主要讲解STM32平台CAN接口的使用,学习其使用方法,实现数据收发。
示例详解
基于硬件平台: STM32F10C8T6最小系统板, MCU 的型号是 STM32F103c8t6, 使用stm32cubemx 工具自动产生的配置工程,使用KEIL5编译代码。
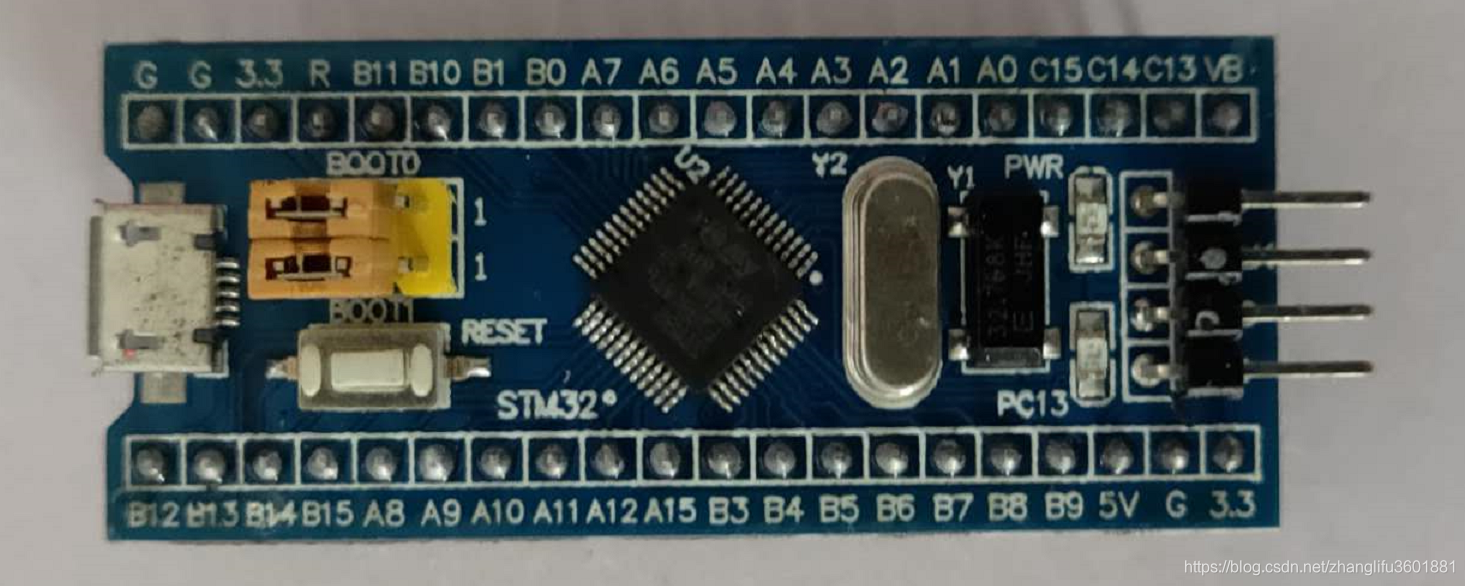
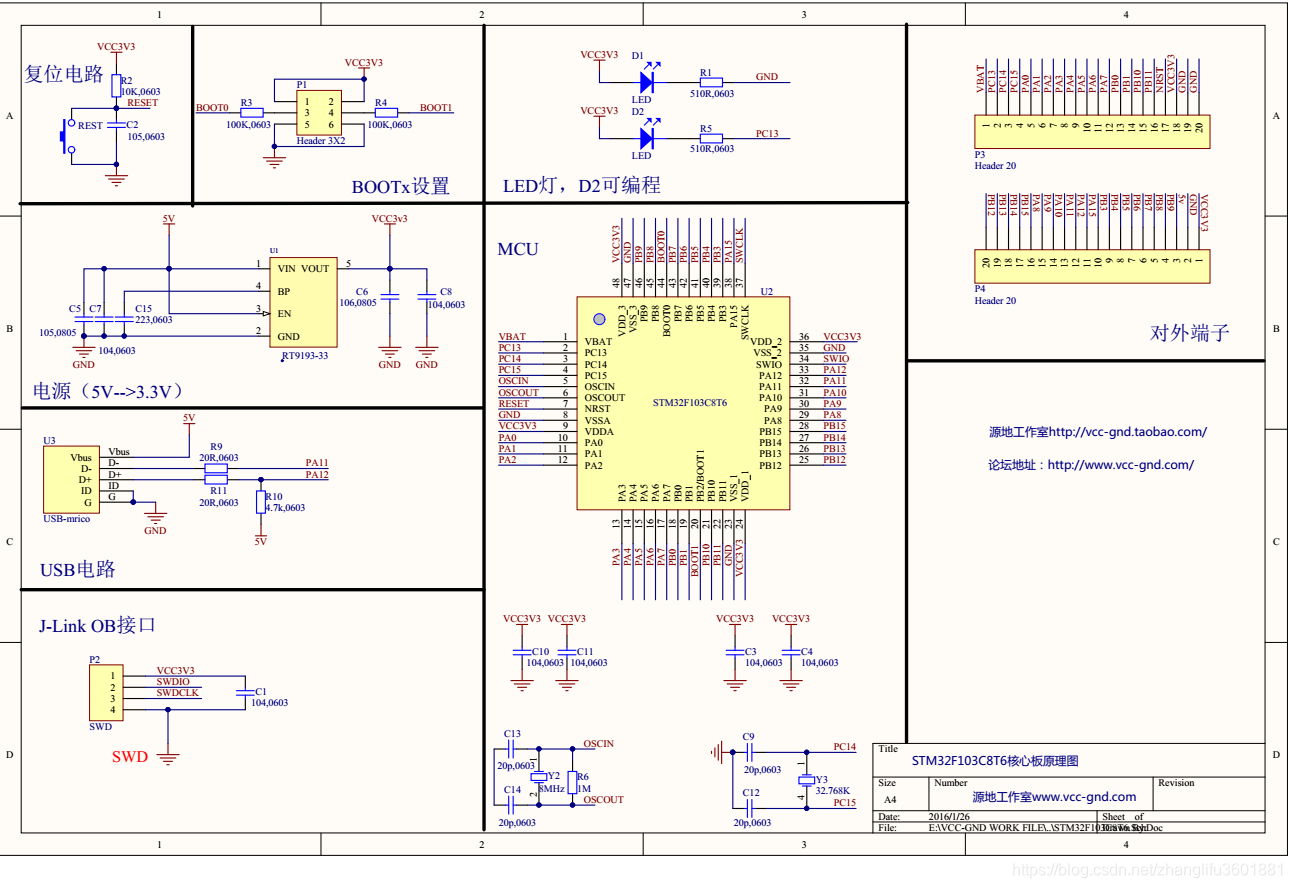
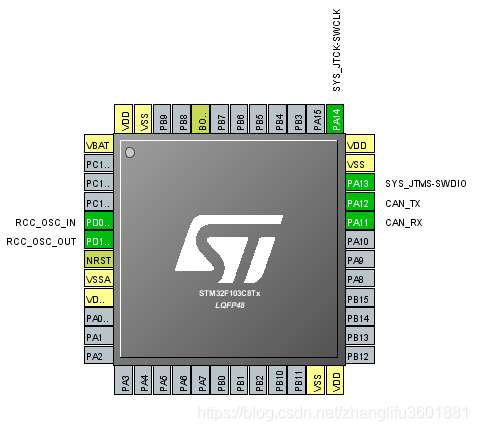
本示例所用的最小系统板原理图:
-
- 从本节开始,关于CUBEMX工具及KEIL工具的操作将不再细讲,如果还有不熟悉的可以查看之前的教程文档。下面直接介绍工程配置:
-
-
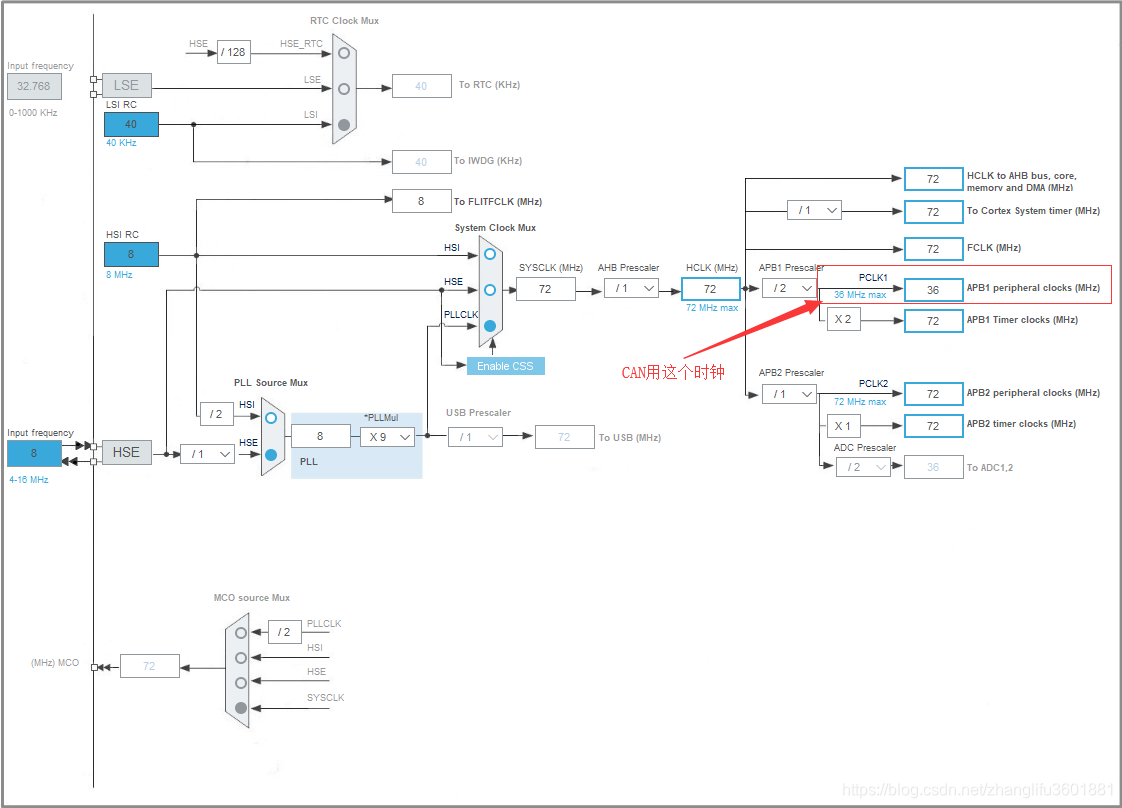
- 系统时钟树
-
-
-
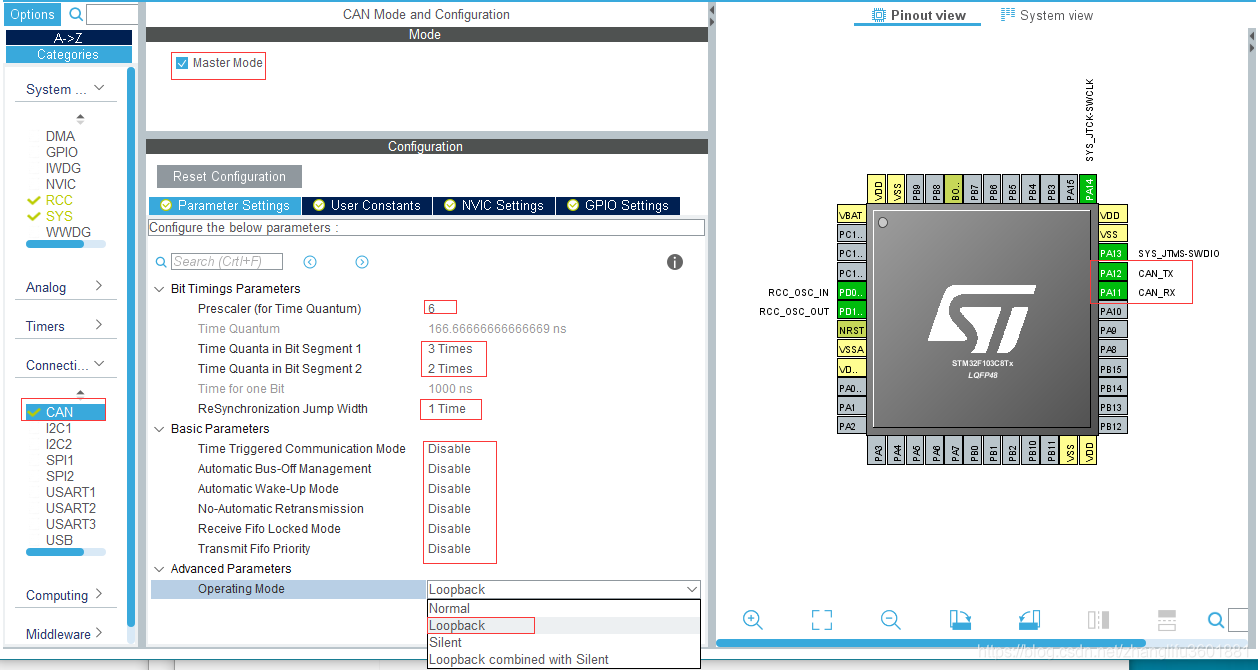
- CAN接口配置
-
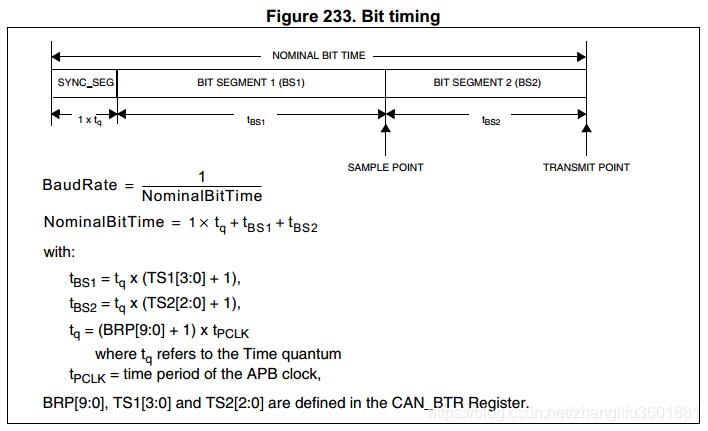
设置1M的波特率,36/6=6M, 1bit = 1+2+3 =6 clk 即 1bit = 1us,可查看下面的BIT图,当然不一定非要这样才能信,理论上保证1bit = 1us 就可以了,下图给的参数是用的较多, 且较为可靠与稳定的一种通信方式。图中还有很多参数,如时间触发通信模式-关、自动总线关断管理-关(实际工程中建议开启)、自动唤醒-关、不自动重发-关、接收FIFO锁定模式-关(新报文可覆盖旧报文)、发送FIFO优先级-关(实际工程可根据需要开启),参数的具体意不懂提可以多试一下,其实熟悉了也很好理解。
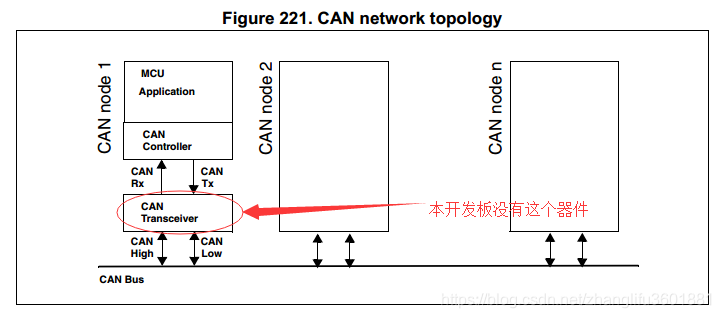
下图中使用的是LoopBack(回环)模式,是因为本文所用的开发板没有CAN收发器/驱动器(fire),为了实验用回环模式来实现自发自收功能,实际工程中应该是Normal模式。
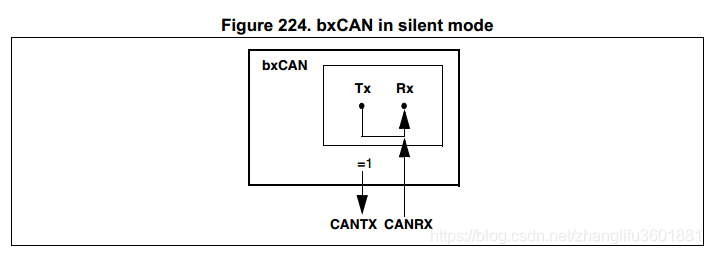
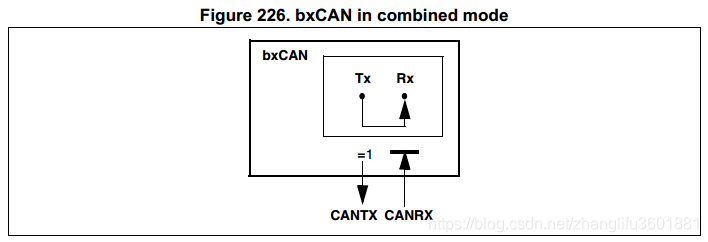
关于几种测试模式的区别,请下下图:
-
-
- 引脚配置
-
-
-
- 中断配置
-
STM32F103的bxCAN占用4个专用的中断向量。通过设置CAN中断允许寄存器(CAN_IER),每个中断源都可以单独允许和禁用
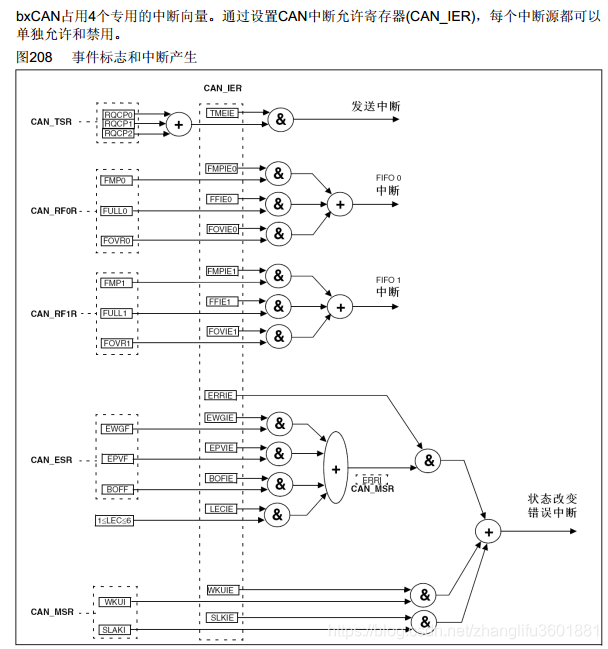
● 发送中断可由下列事件产生:
─ 发送邮箱0变为空, CAN_TSR寄存器的RQCP0位被置’1’。
─ 发送邮箱1变为空, CAN_TSR寄存器的RQCP1位被置’1’。
─ 发送邮箱2变为空, CAN_TSR寄存器的RQCP2位被置’1’。
● FIFO0中断可由下列事件产生:
─ FIFO0接收到一个新报文, CAN_RF0R寄存器的FMP0位不再是’00’。
─ FIFO0变为满的情况, CAN_RF0R寄存器的FULL0位被置’1’。
─ FIFO0发生溢出的情况, CAN_RF0R寄存器的FOVR0位被置’1’。
● FIFO1中断可由下列事件产生:
─ FIFO1接收到一个新报文, CAN_RF1R寄存器的FMP1位不再是’00’。
─ FIFO1变为满的情况, CAN_RF1R寄存器的FULL1位被置’1’。
─ FIFO1发生溢出的情况, CAN_RF1R寄存器的FOVR1位被置’1’。
● 错误和状态变化中断可由下列事件产生:
─ 出错情况,关于出错情况的详细信息请参考CAN错误状态寄存器(CAN_ESR)。
─ 唤醒情况,在CAN接收引脚上监视到帧起始位(SOF)。
─ CAN进入睡眠模式。
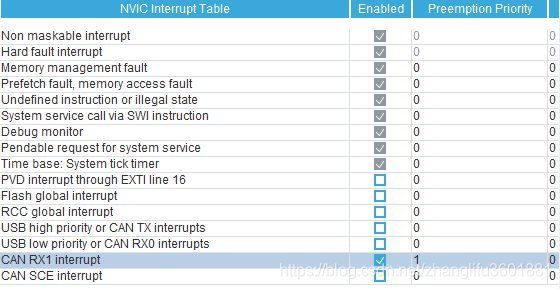
作为功能演示,这里我们只开启FIFO1的接收中断,具休配置如下:
-
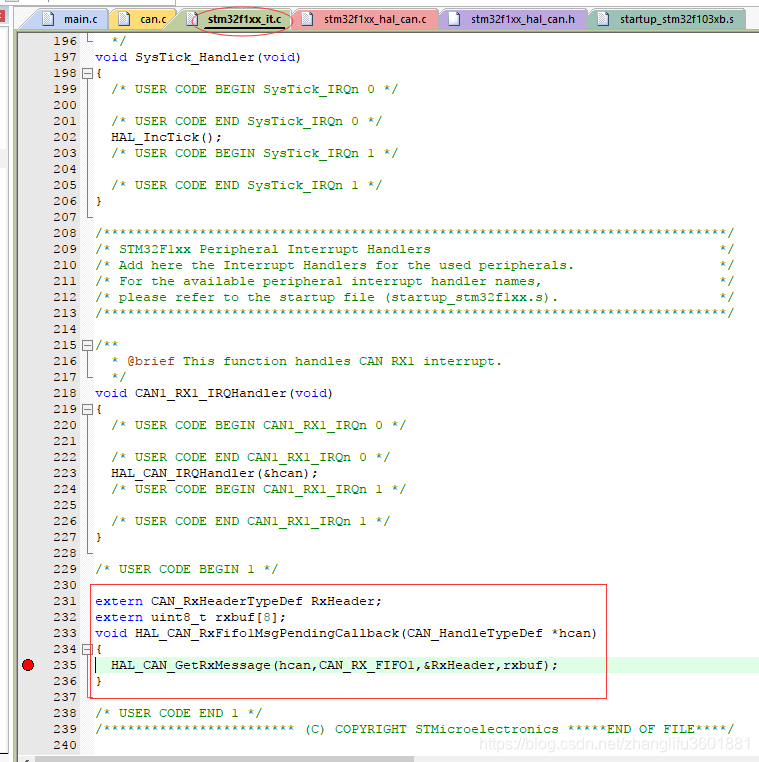
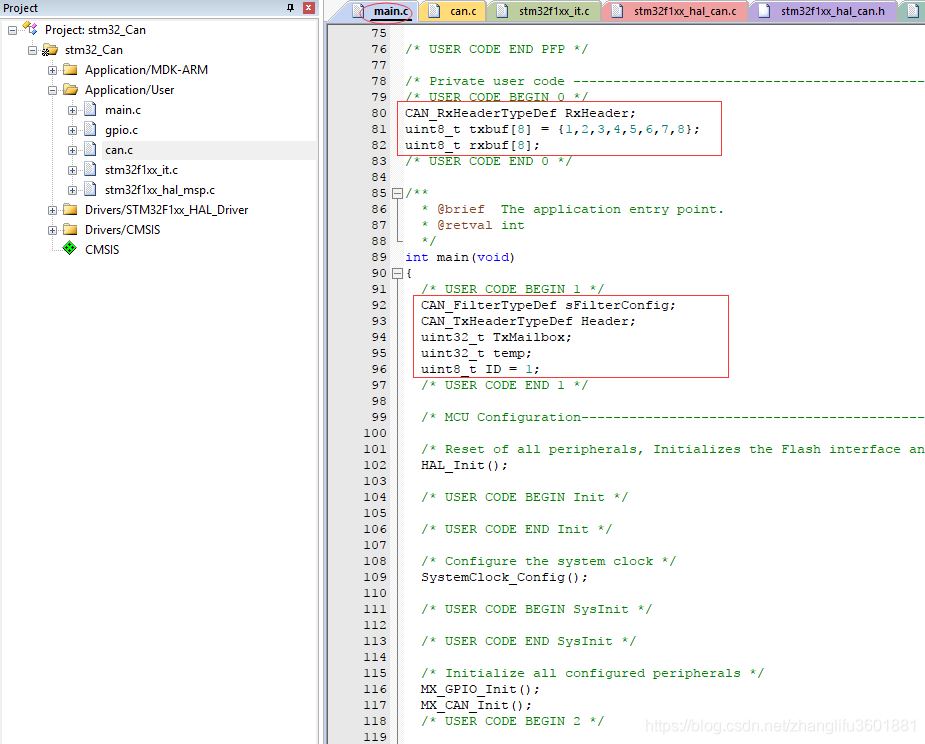
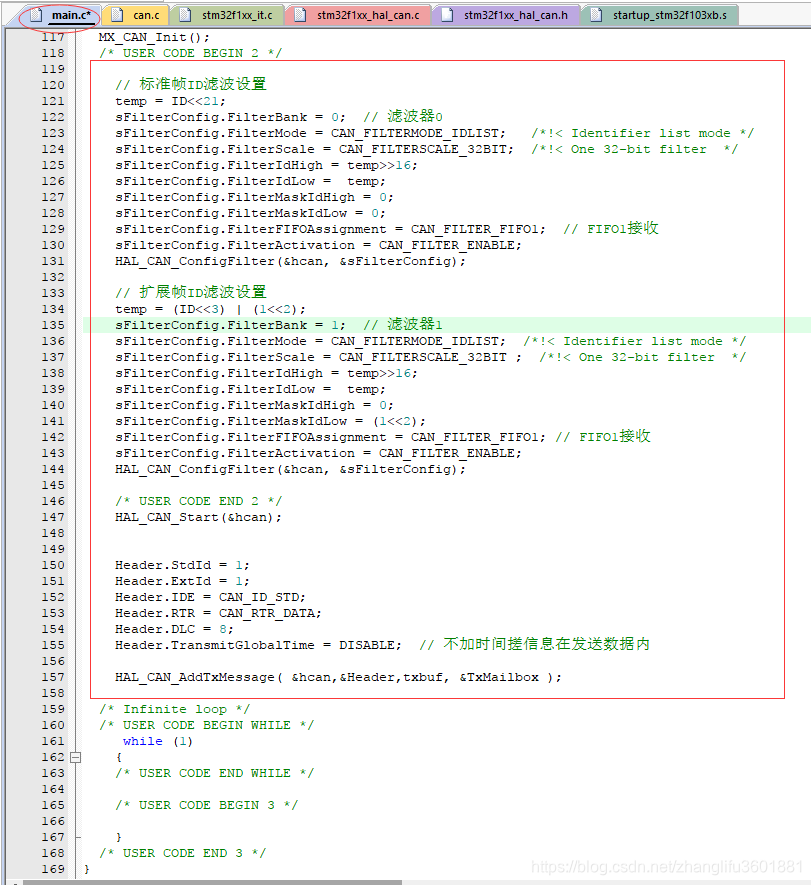
- 工程代码
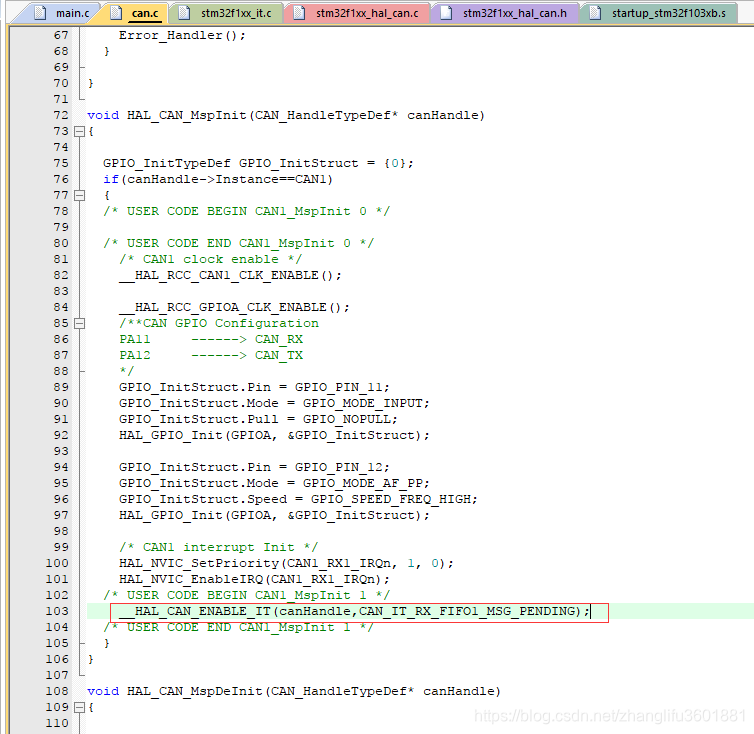
- 分别在can.c 、stm32f1xx_it.c 及main.c 中加入如下图所示代码:
- 工程代码
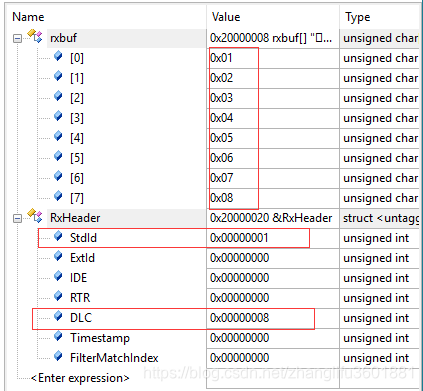
-
- 到此,stm32f103的CAN收发实现就完成了,我们实现了can的发送与接收,调节一下上面的程序,可以看到成功在中断中接收到了所发送的数据。
OK,本期实验完成!下期见!同时如果大家有什么疑问或是有想了解的其它内容,也欢迎大家留言!!最后喜欢这个公众号的同学们记得加关注了,每天都会有技术干货推出!!
文中资料下载,在公众号里给十三发消息:
下载|STM32基础系列教程22
关注十三公众号


















 1655
1655

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









