







 该博客介绍了在Ubuntu 16.04系统中,如何使用Ros软件包与Kinect V1(Xbox 360)相机进行交互,展示RGB和深度图像。内容包括Ros软件包的安装,如openni_launch和freenect_launch,以及设备链接后的测试步骤,如启动节点文件,通过rostopic list查看话题,利用rqt和rviz显示图像,以及rviz中显示深度图点云的方法。
该博客介绍了在Ubuntu 16.04系统中,如何使用Ros软件包与Kinect V1(Xbox 360)相机进行交互,展示RGB和深度图像。内容包括Ros软件包的安装,如openni_launch和freenect_launch,以及设备链接后的测试步骤,如启动节点文件,通过rostopic list查看话题,利用rqt和rviz显示图像,以及rviz中显示深度图点云的方法。
本实验在Ubuntu16.04的环境下,采用两个包分别通过Kinect相机显示RGB图像和深度图像,本文主要叙述一下Ubuntu16.04的系统下使用Kinect相机的过程
1.Ros软件包的安装
两种方式均可:
(1)使用openni_launch
sudo apt-get install ros-kinetic-openni-camera ros-kinetic-openni-launch(2)使用freenect_launch
sudo apt-get install ros-kinetic-freenect-camera ros-kinetic-freenect-stack ros-kinetic-freenect-launch2.设备链接及测试
将Kinect相机供电,然后usb口与电脑相连接
(1)节点文件启动:
安装的openni_launch,输入命令:
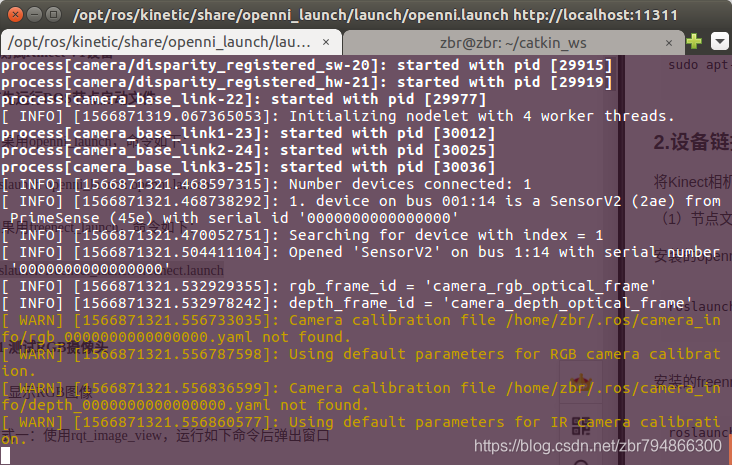
roslaunch openni_launch openni.launch安装的freennect_launch,输入命令:
roslaunch freenect_launch freenect.launch正常情况下会出现:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2295
2295

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









