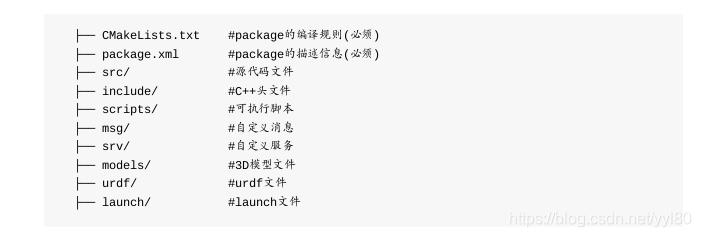
《一》概述 (1)软件包:二进制包和源代码包 (2)包是Catkin编译系统的单元,源代码应该保存在package中。 《二》package结构 必不可少文件:CmakeLists.txt和package,xml C++ 程序:src/ 、include/ 《三》package的创建

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









 本文详细介绍了ROS(机器人操作系统)中的软件包概念,包括二进制包和源代码包的区别,以及包作为Catkin编译系统的基本单元的重要作用。文章深入解析了package的必备文件CmakeLists.txt和package.xml的作用,同时讲解了C++程序如何组织在src/和include/目录下。
本文详细介绍了ROS(机器人操作系统)中的软件包概念,包括二进制包和源代码包的区别,以及包作为Catkin编译系统的基本单元的重要作用。文章深入解析了package的必备文件CmakeLists.txt和package.xml的作用,同时讲解了C++程序如何组织在src/和include/目录下。
 必不可少文件:CmakeLists.txt和package,xml
必不可少文件:CmakeLists.txt和package,xml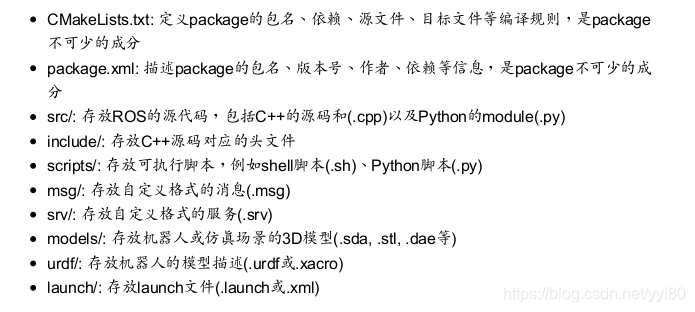


















 1568
1568





