






原文链接
贡献
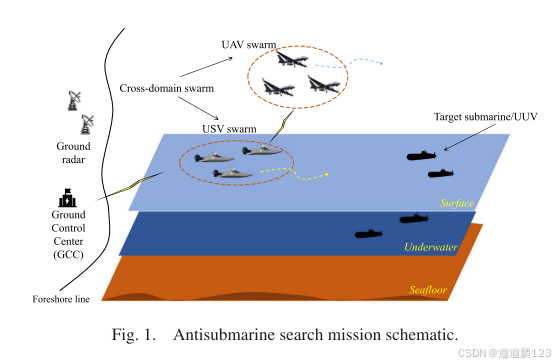
针对UAV和USV的跨域系统,生成路径的目标是最小化的旅行时间,同时实现反潜搜索的完全覆盖,提出一个两阶段的策略。采用预先规划和实时规划相结合的方法,增强了算法的灵活性和鲁棒性。
在第一阶段,确定最佳航路点,以平衡UAV和USV之间的任务量。建立了映射模型,描述了不同无人平台与使命环境之间的关系。基于深度学习理论中的解卷积运算方法,将多域无人平台协同搜索路径规划问题建模为“平台-传感器-环境”模型,根据多域异构平台的速度和传感器探测范围确定航路点的解空间,为路径规划问题的求解提供基础。
在第二阶段,通过结合航路点聚类和闭环轨迹生成来生成每个UAV/USV的搜索轨迹。能够根据无人机群中平台的类型、数量和位置进行快速路径规划和重规划,提高了算法的实时性。

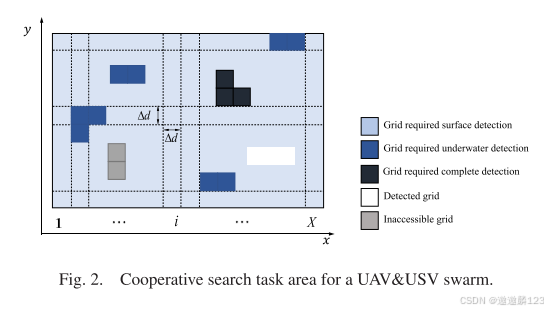
协作搜索任务的最终目标是将所有网格单元的值从1或-1转换为0。
本文提出方法的优点:
1)允许执行搜索任务的无人系统具有不同的运动范围、速度和检测性能,这对于多域无人群体搜索任务是有用的。
2)无人系统的路径点分散程度不再取决于环境地图的网格大小,因此无人系统可以根据实际情况(自身的计算能力、控制精度等)调整网格划分的精细程度,降低了技术实现的难度。
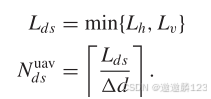
UAV探测范围
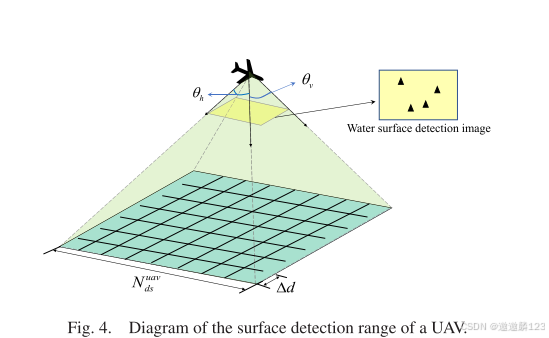
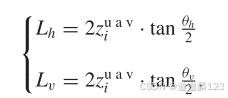
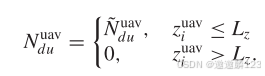
磁探头的有效高度通常很低,因此取Lz作为磁探头能够探测水下潜艇的最大有效飞行高度。
USV探测范围
![]()
基于反卷积的“平台-传感器-环境”映射方法
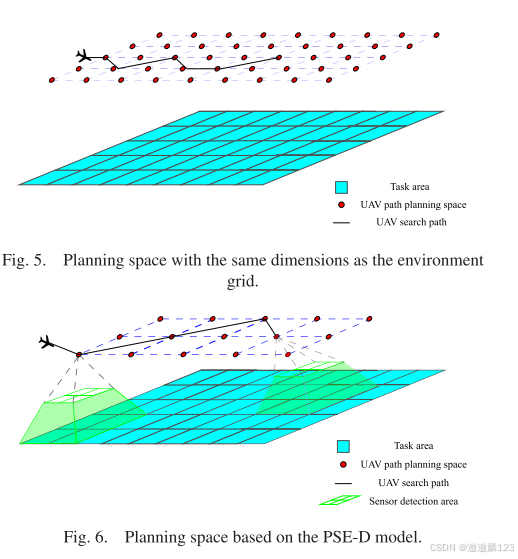
UAV的轨迹规划并非通过真实的时间选择其下一个目标航路点来执行。
而是采用PSE-D模型。在为无人机/无人艇规划航路点时,可以通过简化航路规划来减小航路点规划空间。即:在不改变规划规模的情况下,航路点之间的距离允许大于环境网络的大小。通过考虑传感器探测范围,可以减小航路点规划空间,提高航路规划效率。
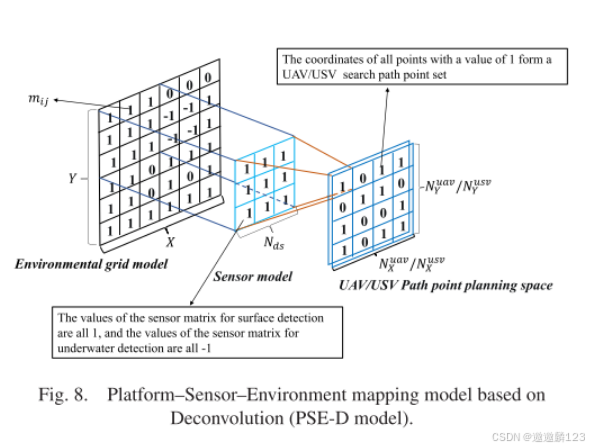
根据反卷积运算,可以通过将传感器矩阵与对应的航路点规划矩阵相乘和拼接来导出UAV和USV群可以检测到的水面和水下区域。
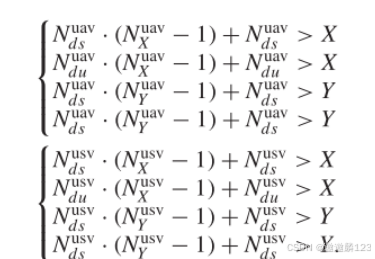
利用反卷积算子得到了UAV/USV路径规划空间的空间维数,输入图像和输出图像的大小之间的关系可以表示为

i表示输入图像的大小,s表示去卷积运算的步长,r表示去卷积核的大小,o表示输出图像的大小。如果将车辆的航路点规划空间作为输入图像,将传感器覆盖范围作为卷积核,将车辆的搜索覆盖范围作为输出图像,则根据上式,为了实现使命区域的完全覆盖,UAV和USV的航路点规划空间应满足以下条件:
水面探测传感器用所有值都为1的矩阵表示,水下探测传感器用所有值都为−1的矩阵表示。根据反卷积运算,通过将传感器矩阵与相应的航路点规划矩阵相乘和拼接,可以得出UAV和USV群能够探测到的水面和水下区域。

协同搜索任务的目标是最小化搜索时间,这可以被认为大致等同于找到UAV和USV群的最小路径点数量
![]()
vuav和vusv分别表示UAV和USV的速度,并且是常数。nuav和nusv分别表示UAV和USV的航路点数量,是待优化的变量。
在将无人机与无人艇群协同搜索路径规划问题简化为0-1规划问题的基础上,有效求解出使命区域全覆盖所需的路径点集,进而得到无人机与无人艇群中各无人平台的最优搜索路径。
然而,在这样做之前,有两个关键问题需要解决。
1)如何保证优化算法得到的路径点集完全覆盖任务区域。
2)如何按照优化后的航路点获取各个无人平台的轨迹。
基于改进遗传算法的最优路径点集求解方法
第一步是计算UAV和USV应该覆盖的最小路径点集;
第二步是为UAV和USV群中的每个平台生成可行路径。
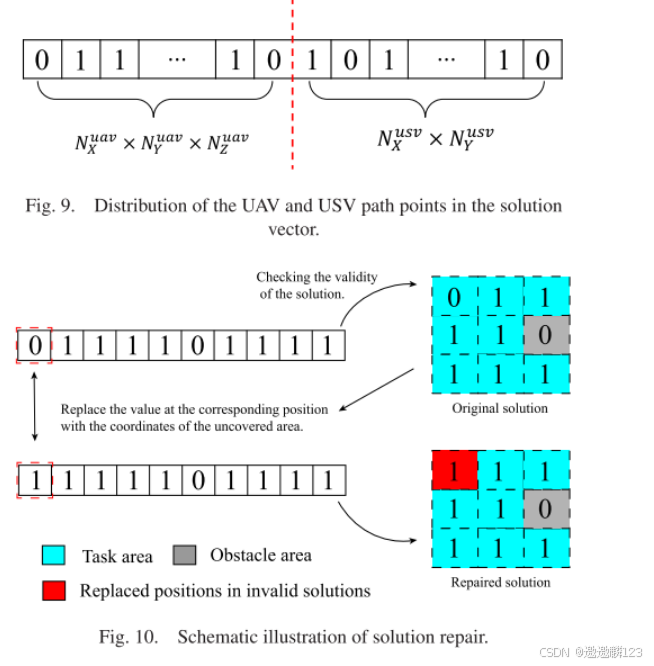
step 1.初始化c1解决方案:随机生成c1染色体作为初始解,每个染色体为一个二进制向量,长度如图9所示。
step 2.检查每个解决方案的有效性并修复无效的解决方案:为确保生成的路径点集完全覆盖任务区域,有必要检查初始解决方案的有效性。对于不能完全覆盖任务区域的解决方案(即,不满足(16)),则应用修复操作以使这些解完全覆盖任务区域,如图10所示。
首先,计算任务区域中未被覆盖的区域,然后根据函数frec计算覆盖这些区域的路径点。最后,这些路径点被连续地添加到无效解。在解算修复过程中,根据无人机和水下机器人的特点,分别为无人机和水下机器人分配水面搜索盲区和水下搜索盲区,进行搜索。
step 3.选择、交叉和突变
step 4.种群更新和计算终止
基于群体规模的路径点聚类算法
通过使用聚类的路径点来生成闭环轨迹来执行路径规划。
闭环轨迹生成
假设UAVj对应的路径点子集由七个路径点组成。然后,通过以下步骤生成UAV j的闭环轨迹。
step 1:无人机j的位置表示为p0(x0,y0),七个路径点表示为p1(x1,y1),...,p7(x7,y7)。
step 2:选择距离UAV j最近的路径点作为轨迹的起点和终点,由Point 0表示。
step 3:根据路径点与无人机j的y坐标的相对值,将该子集中的路径点划分为有序集合Point1和Point2,其中Point1中的路径点按其x坐标值从小到大排序,Point2中的路径点按其x坐标值从大到小排序。
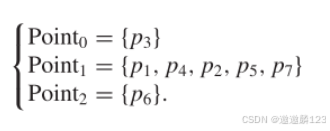
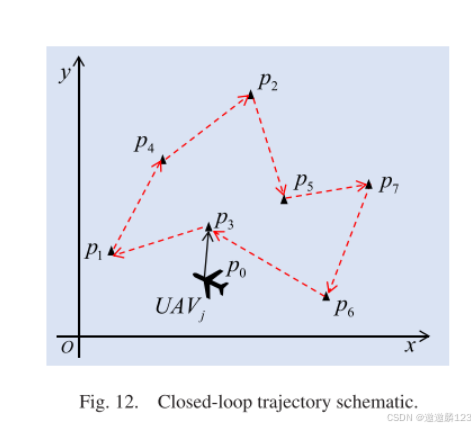
step 4:根据集合Point 0、Point 1和Point 2中元素的排序,得到无人机j的闭环轨迹。对于图12所示的示例,该轨迹是{p0,p3,p1,p4,p2,p5,p7,p6,p3}。
通过上述求解最优路径点集、聚类成路径点子集、生成相应的闭环轨迹的步骤,每个无人平台都可以获得自己完成反潜搜索使命所需的轨迹。
优点
1)蜂群大小可以随时调整,不受任何严格要求的限制。这对于在高度对抗条件下的搜索任务是有利的。指挥员可以根据作战区域的地理条件和气象条件,预先获得路径点集(可以基于PSE-D模型计算)。然后,在操作过程中,可以执行基于可用无人机和USV的数量的聚类,以有效地将侦察任务分解到各个无人平台之间,这是一种非常灵活的方法。
2)该算法对群体成员的初始位置没有限制,可以根据初始位置分配最优路径点子集,有效利用群体的初始分布。目前大多数研究没有考虑无人机和无人艇的初始位置,这可能会导致额外的旅行距离和损害风险,从而降低了相关算法的优势。相比之下,我们的方法可以有效地利用无人机和USV的初始位置,以提高搜索效率。
3)轨迹生成过程有效地结合了轨迹的预先规划和实时规划;预先规划由指挥中心集中执行,以获得UAV和USV群的路径点集,而实时规划过程分布在无人平台之间,以获得所需的轨迹,从而允许算法充分利用指挥中心和无人平台的运算能力。
实验
通过为无人机增加水下搜索点,可以使无人机和无人艇需要访问的路径点总数之比与它们的速度之比基本相同,从而使搜索任务更加均衡,实际搜索时间更短。
通过根据UAV的数量对规划的路径点进行聚类,路径点可以有效地用于规划可以由UAV执行的轨迹。此外,由于规划的路径点形成闭环,每个UAV可以选择相应的附近路径点作为使命开始点和结束点(在该图中由黑色箭头指示),这可以减少UAV的当前分配的使命结束与下一个使命开始之间的缓冲时间。
平均路径长度和最大路径长度均随种群规模的增大而减小。然而,这种下降趋势是非线性的,这表明通过无人机群和无人机机群的协同作用,异构平台的路径长度确实可以有效地减少,从而提高使命效率;但随着机群规模的增加,改善的速度会降低。这意味着在给定的空间范围内,较大的机群不一定更好,并且在实际应用中,可以基于仿真预先确定最佳UAV和USV机群大小。
对于UAV和USV,随着群规模的增加,最大路径长度的减小小于平均路径长度,这意味着,基于最佳路径点集,多TSP求解方法可用于“均衡”各个平台的路径长度(即:使最大路径曲线更接近平均路径曲线),从而减少最大路径长度和完成搜索任务所需的时间。
通过聚类算法和闭环轨迹生成过程生成的路径已经可以近似“均衡”无人机群和无人机群的任务时间,且该方法的复杂度明显低于同时求解多个TSP的复杂度。
无人机和无人机机群的单独任务规划相比,协同任务规划能有效提高任务完成效率,主要是因为协同规划算法能更好地平衡两类平台之间的任务量,从而更好地发挥多领域平台的优势互补。
适度增加交叉操作的比特数和交叉概率可以显著提高算法的收敛性。这一改进主要归功于交叉操作在算法迭代过程中增加解集多样性的能力。过高的交叉概率会妨碍在每一代中保存最优解,从而对收敛速度产生不利影响。过多的变异操作会使算法不稳定,对算法的收敛性产生不利影响。突变的概率增加。这种调整提高了算法的优化能力,从而加快了收敛速度。过多的交叉操作会影响算法迭代过程中最优解的保持,而过多的变异操作会使算法不稳定。

















 5024
5024

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









