






原文:来自知网
贡献
针对非精确情报信息环境下跨域无人集群动态目标分配问题的算法进行了研究。
1)跨域无人机群作战场景,对由于探测信息不精确性带来的目标位置和火力单元落点的不确定性进行了分析,建立了目标预分配的概率模型,并设计改进的离散多目标粒子群算法求解。
2)针对作战环境中实时出现的新目标,提出了基于市场机制的合同网目标重分配算法,实时更新目标分配方案。
描述
目标位置的不确定性
火力资源落点的不确定性
毁伤效能的不确定性
目标预分配
目标函数
1)无人集群摧毁目标所获得的收益。目标分配的首要目标是获得最大化收益。
2)我方所消耗的火力资源成本。
约束条件
1)我方无人机/无人艇携带的火力资源有限;
2)为保证作战效能,需要保证每个目标的毁伤程度达到一个预期值。通常当目标的毁伤程度大于ε的概率大于ζ时,即认为该目标对我方已无威胁。
粒子群
目标实时分配
需要进行重分配的触发场景通常有以下3种:
①出现新的任务目标;
②无人机出现突发状况无法完成任务;
③目标位置等信息与预规划时出现较大偏差。
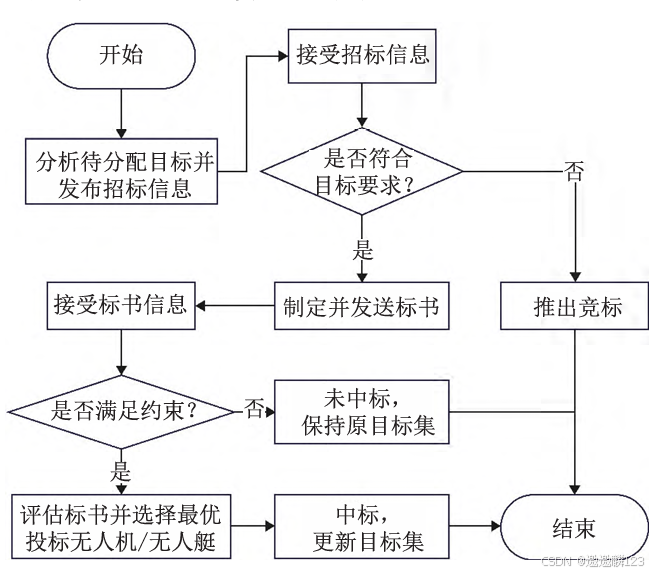
基于市场机制合同网的任务重分配。(借鉴思想)

















 3080
3080

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









