




上一章节我们了解完无感 FOC 的整个流程并简单说了 Clark 变换、Park 变换、SVPWM 变换的原理,还没看过前面文章的伙伴们指路:
新手也可以看懂无感 FOC(一) - 大大通(简体站)
新手也能搞懂的无感 FOC(二) - 大大通(简体站)
新手也能搞懂的无感 FOC(三) - 大大通(简体站)
这节就让我来为大家介绍一下无感 FOC 中的观测器。
在现代电机控制领域,无感FOC的实现离不开观测器的支持,观测器用于估计电机的转子位置和速度,从而实现无传感器控制。其中这部分的作用跟电机中的编码器功能一样,所以有带霍尔传感等编码器直接感知的叫有感 FOC。
常见的几种观测器有:滑膜观测器、龙伯格观测器、非线性磁链观测器等。
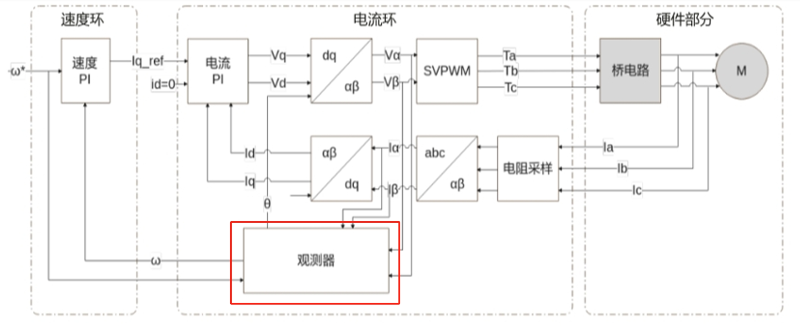
在介绍观测器之前,我们可以从流程图上看到,观测器输入的是 Ia 和 Iβ,Va 和 Vβ,输出的是电机转子的角度和速度(也就是我们要知道的值),而这两个参数正好是在反电动势中,我们由此可以知道观测器观测的是:a 轴 和 β 轴的反电动势。
根据电机在静止坐标系:a-β中的电压方程:
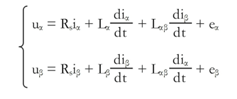
其中:

但是有人又要问了,如果普通的算术推演都能直接算出来,怎么还要观测器?因为在实际运用中,我们是在MCU 的内部构建了一个电机电流的数学计算过程,并将该电流与采样得到的真实电流比较,再将比较的结果反馈到 MCU 中的电机电流计算中,将结果加以修正,以使得计算电流与真实电流无限趋近,从而能保证电机的反电动势计算结果的准确性。下图是真实电流与估计电流产生机理:
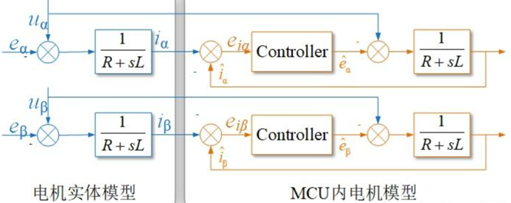
了解了原理以后,其实无论是滑膜观测器、龙伯格观测器还是磁链观测器,本质上都是想要为了采用到的电流无线趋近于 MCU 要计算的电流,他们在设计算法上不同,但是基本目的相似。
- 滑膜观测器:
原理:通过引入一个滑模面,使得系统状态在滑模面上滑动,从而实现对转子位置和速度的估计。公式如下:
- 优点:鲁棒性强,收敛速度快,具有很快的动态响应特性。
- 缺点:可能会引入高频抖振,需要额外的滤波处理。
- 使用场景:适用于对鲁棒性要求较高的场合,如电机控制中的低速和高速运行区域。
- 龙伯格观测器:
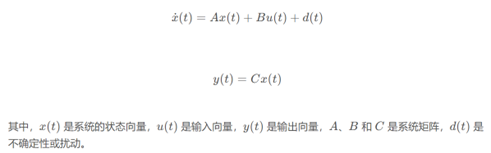
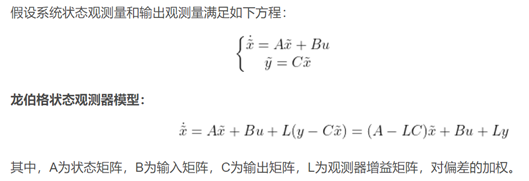
原理:一种线性观测器,通过设计一个状态反馈矩阵,使得观测器的输出与实际系统的输出之间的误差趋近于零,从而实现对系统状态的估计。公式如下:
- 优点:设计简单易于实现、计算量低、更适合实时控制。
- 缺点:对系统模型的准确性要求高,鲁棒性较差。
- 适用场景:用于线性系统或对计算资源要求较低的场合。
- 磁链观测器:
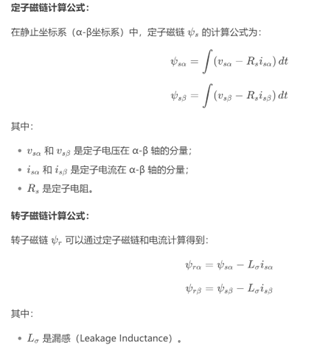
原理:磁链观测器通过测量电机的电压和电流,结合电机模型,估计电机的磁链和转子位置。常见的磁链观测器包括电压模型和电流模型,公式如下:
- 优点:直接估计磁链,适用于磁场定向控制。在中高速区域性能较好。实现简单,计算量适中。
- 缺点:在低速区域性能较差,受反电动势(Back-EMF)影响较大。对电机参数(如电阻、电感)的准确性要求较高。对噪声和测量误差敏感。
- 适用场景:适用于中高速运行的电机控制场合,如电动汽车驱动、工业电机控制等。
好了,无感 FOC 的部分已经介绍完啦,感谢大家的支持~
参考文章:
控制系统-观测器介绍与设计-龙伯格观测器及其与控制器对比_观测器理论-优快云博客
【电机控制】PMSM无感FOC控制(七)滑模观测器的应用_滑膜观测器-优快云博客


















 221
221

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









