




 本文介绍一种滤除点云离群点的滤波方法——半径滤波器。其工作原理是设定滤波半径,计算每个点在半径范围内其他点的个数,少于设定阈值的点将被滤除。还给出了PCL核心代码实现及完整代码,并提供了参考资料。
本文介绍一种滤除点云离群点的滤波方法——半径滤波器。其工作原理是设定滤波半径,计算每个点在半径范围内其他点的个数,少于设定阈值的点将被滤除。还给出了PCL核心代码实现及完整代码,并提供了参考资料。
适用对象
滤除离群点的一种滤波方法。
工作原理
通过设定滤波半径,计算每个点在其半径范围内的其他点的个数。半径范围内其他点个数少于某一设定的阈值的点将被滤除。
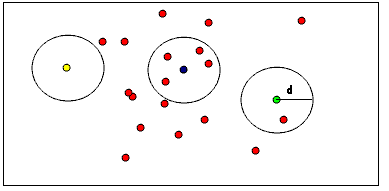
如上图所示,假设设置半径为d,分别考察黄色、蓝色和绿色的三个点。若设置点个数阈值为1,则黄色点将被滤除;若设置点个数阈值为2,则黄色点和绿色点都将被滤除。
PCL核心代码实现
pcl::RadiusOutlierRemoval<pcl::PointXYZ> outrem;//创建半径滤波器对象
outrem.setInputCloud(pointCloud_raw); //设置输入点云
outrem.setRadiusSearch(0.02); //设置半径为2cm
outrem.setMinNeighborsInRadius(5); //设置最小邻接点个数阈值,半径范围内其他点个数少于5的点将被滤除
outrem.filter(*pointCloud_filter); //执行滤波
完整代码
#include <iostream>
#include <pcl/point_types.h>
#include <pcl/filters/radius_outlier_removal.h>
#include <pcl/filters/conditional_removal.h>
int main (int argc, char** argv)
{
if (argc != 2)
{
std::cerr << "please specify command line arg '-r' or '-c'" << std::endl;
exit(0);
}
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_filtered (new pcl::PointCloud<pcl::PointXYZ>);
// Fill in the cloud data
cloud->width = 5;
cloud->height = 1;
cloud->points.resize (cloud->width * cloud->height);
for (size_t i = 0; i < cloud->points.size (); ++i)
{
cloud->points[i].x = 1024 * rand () / (RAND_MAX + 1.0f);
cloud->points[i].y = 1024 * rand () / (RAND_MAX + 1.0f);
cloud->points[i].z = 1024 * rand () / (RAND_MAX + 1.0f);
}
if (strcmp(argv[1], "-r") == 0){
pcl::RadiusOutlierRemoval<pcl::PointXYZ> outrem;
// build the filter
outrem.setInputCloud(cloud);
outrem.setRadiusSearch(0.8);
outrem.setMinNeighborsInRadius (2);
// apply filter
outrem.filter (*cloud_filtered);
}
else if (strcmp(argv[1], "-c") == 0){
// build the condition
pcl::ConditionAnd<pcl::PointXYZ>::Ptr range_cond (new
pcl::ConditionAnd<pcl::PointXYZ> ());
range_cond->addComparison (pcl::FieldComparison<pcl::PointXYZ>::ConstPtr (new
pcl::FieldComparison<pcl::PointXYZ> ("z", pcl::ComparisonOps::GT, 0.0)));
range_cond->addComparison (pcl::FieldComparison<pcl::PointXYZ>::ConstPtr (new
pcl::FieldComparison<pcl::PointXYZ> ("z", pcl::ComparisonOps::LT, 0.8)));
// build the filter
pcl::ConditionalRemoval<pcl::PointXYZ> condrem;
condrem.setCondition (range_cond);
condrem.setInputCloud (cloud);
condrem.setKeepOrganized(true);
// apply filter
condrem.filter (*cloud_filtered);
}
else{
std::cerr << "please specify command line arg '-r' or '-c'" << std::endl;
exit(0);
}
std::cerr << "Cloud before filtering: " << std::endl;
for (size_t i = 0; i < cloud->points.size (); ++i)
std::cerr << " " << cloud->points[i].x << " "
<< cloud->points[i].y << " "
<< cloud->points[i].z << std::endl;
// display pointcloud after filtering
std::cerr << "Cloud after filtering: " << std::endl;
for (size_t i = 0; i < cloud_filtered->points.size (); ++i)
std::cerr << " " << cloud_filtered->points[i].x << " "
<< cloud_filtered->points[i].y << " "
<< cloud_filtered->points[i].z << std::endl;
return (0);
}
参考资料
Removing outliers using a Conditional or RadiusOutlier removal

















 1012
1012

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









