







一切,从这里开始。。。
Probabilistic Data Association Filters (PDAF) - a tracking demo
The Extended Kalman Filter: An Interactive Tutorial for Non-Experts
An Introduction to the Extended Kalman Filter
上面这个链接,其实有趣的是其他部分的链接,特别是Finaicial Engineering部分,
绝大多数卡尔曼滤波器的应用都只假设匀速运动,最多加一个固定的加速度值。更复杂的引用可以参考WIKI上的运动方程:
最复杂的例子要算下面的
Sensor Fusion using the Kalman Filter
1. 前言
这可能应该是最简单的算法/模型/滤波器。。。随便你用什么名字叫它,都不会错。
越简单的东西越不简单。现在觉得,如果能把这个模型真的搞清楚了,就算入门了。
2. 资源
卡尔曼滤波器的资源,无论是网上还是网下,都可以用不计其数来形容。
非常经典的,有Greg Welch 和 Gary Bishop的
An Introduction to the Kalman Filter
引用5,300次。。。
另外还有一个中译本,翻译的很不错,虽然有的地方翻的很误导。。。
3. 应用
具体到应用,最简单的例子应该是估计一个匀速运动物体的位置。很奇怪,没有搜到什么权威或者清楚的例子,也许是太简单了?也许是还没找到
比较有用的是同一个作者的两片stackoverflow问题,和下面的回答及连接
Implementing a Kalman filter for position, velocity, acceleration
More on: Kalman filter for position and velocity
提问者一开始没有理解 the wikipedia example on one dimensional position and velocity实际已经包含了对速度对估计
Sensor Fusion using the Kalman Filter
考虑的比较全面。“基本的”模型就考虑了三维空间中9维的状态向量(state vector),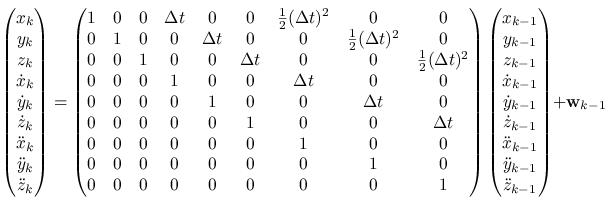
接下来还考虑了位置和角度同时考虑的状态向量,和非线性的情况。
另一个所谓的
Simple Kalman filter for tracking using OpenCV 2.2
只是普通1D的一个简单扩展,完全没有考虑加速度。其中提到的一个报告
Tracking Bouncing Balls Using Kalman Filters and Condensation
也可以看看,互相印证参考。不过没有代码。
Youtube上的Student Dave教程很不错,讲的很清楚。但是在Q的计算上完全略过,直接跳到Matlab代码,让我挠了很久的头
4. 扩展
完全从滤波器的角度来考虑的
Is a Kalman filter suitable to filter projected points positions, given Euler angles of the capturing device?
OReilly的Learning OpenCV Bradski and Kaehler 也有好几页Kalman 滤波器的,不过。。讲的好啰嗦。。。

















 1291
1291

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









