



一、PC(Peter-Clark)算法
PC算法(Peter-Clark算法)是一种经典的贝叶斯网络结构学习方法,核心目标是从观测数据中推断变量间的因果关系或条件独立关系,构建有向无环图(DAG,即贝叶斯网络)。
PC算法过程:
1.先将所有变量进行连接,从而获得一个完全无向图。
2.通过条件独立性(d-separation)测试删除多余边获得骨架图。
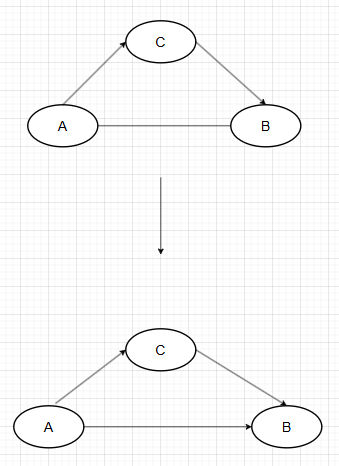
3.随后识别骨架图中的对撞结构(v-结构),可以确定部分边的方向。
4.在确定所有对撞结构之后,通过DAG图的性质和Meek规则尝试确定剩余边的方向。

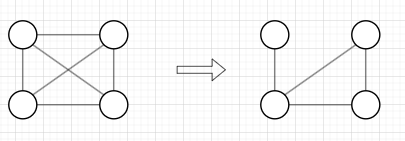
一、获得完全无向图
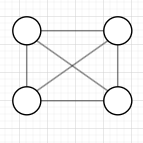
二、 获得骨架图
条件独立性常用的方法为Finsher-z检验。由于PC算法假定所有的变量服从多元高斯分布,那么我们可以通过计算偏相关系数来判断变量之间是否条件独立。
偏相关系数定义:
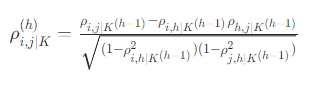
对于任意两个变量i和j,在排除h个其他变量(可能是变量总数等相关量) 影响后的
阶偏相关系数。
该公式通过已有的低阶相关系数来计算当前阶的偏相关系数 ,体现了在控制特定数量变量后两变量的关联程度。
FisherZ变换
为了检验偏相关系数是否为0,需要将其通过Fisher Z变换转化为正态分布:
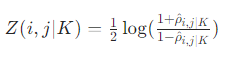
原假设:ρ = 0,给定条件k下,变量i和j之间不存在条件相关性,即条件独立
备择假设:ρ ≠ 0
三、识别对撞结构
DAG图的构成主要分为三个结构:链式,叉式,对撞式
且
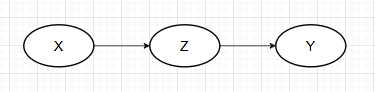
链式
且
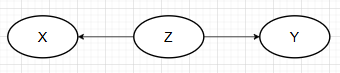
叉式
且
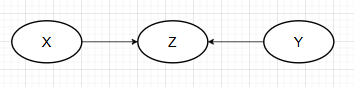
对撞式
上述三种结构,只有对撞式中,固定变量Z时,变量X和变量Y由独立变为不独立。由此性质,我们可以找出骨架图中的对撞式结构。
四、确定剩余边的方向
Meek规则:
1.避免产生新的碰撞:
2. 避免成环:
3. 避免生成新的碰撞结构(2)
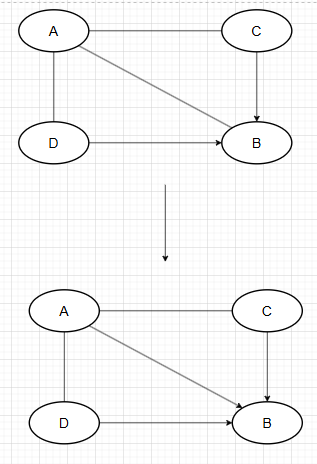
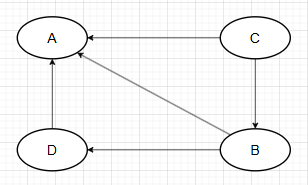
如果上述图,将AB边识别为A <- B时,由于D->B,C->B已知,为了避免成环,那么AD和AC边可以定下方向,即为A<-D, A<-C。
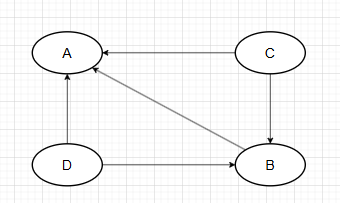
该图出现了新的对撞结构D->A<-C
故AB边的方向为A->B
4. 避免生成新的碰撞结构(3)
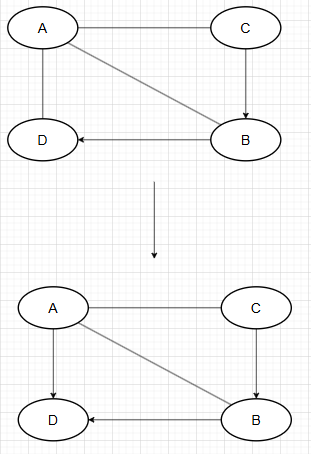
如果上述图,将AD边识别为D -> A时,由于B->D已知,为了避免成环,那么AB边可以定下方向,即为A<-B
又由于B<-C ,为了避免成环,AC边可定下方向,即为A<-C
该图出现了新的对撞结构D->A<-C
故AD边的方向为A->D
到此,可以生成一个部分有向无环图,PC算法结束。
二、FCI算法
FCI算法是PC算法的延申,PC算法假设所有的因素都被观察到,没有混杂因素影响,FCI则考虑了存在混杂因素。并且FCI的结果不为DAG图,为PAG图(部分祖先图)。
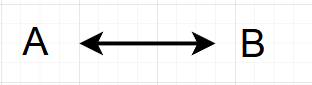
FCI会识别出双箭头的情况,当出现双箭头时,表示变量之间出现混杂因子。
FCI算法过程:
1.先将所有变量进行连接,从而获得一个完全无向图。
2.通过条件独立性(d-separation)测试删除多余边获得骨架图。
3.随后识别骨架图中的对撞结构(v-结构),可以确定部分边的方向。
4.在确定所有对撞结构之后,通过Meek规则尝试确定剩余边的方向。
注意:FCI在构建边时会分别判断一条边的两侧是否该出现箭头,并且边的两侧互不影响。
可能出现边的情况:

A是B的因。
可能是直接原因也可能是包含其他可观测变量的间接原因。同时AB之间也可能存在不可观测的混杂因子。
消除可能:
B不是A的因
存在不可观测变量(L)是A和B的共因。
从L到A或从L到B的因果路径上可能存在可观测变量。
消除可能:
A不是B的因,B也不是A的因
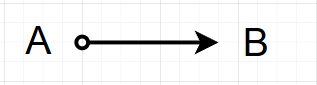
A是B的因,或存在不可观测变量是A和B的共因,或二者皆有
消除可能:
B不是A的因
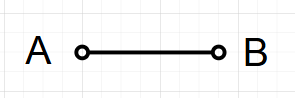
这种类型的边表示下面情况中的一种:
(a) A是B的因
(b) B是A的因
(c) 存在不可观测变量是A和B的共因
(d) (a)和(c)同时发生
(e) (b)和(c)同时发生
后续过程与PC算法过程一致
但是对边方向的生成有所区别
例如:{X,Y,Z},且存在未观测变量U影响X和Y:
假设真实的因果结构为:
{% asset_img Example.png Example%}
其中,L是一个潜在变量(不可观测)
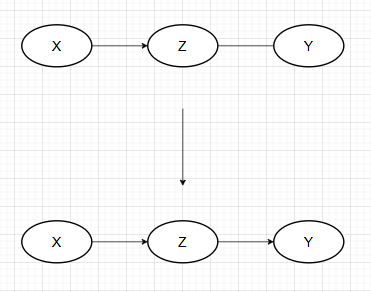
PC算法:
由于 L 不可见,PC 算法无法解释 X 与 Y之间的相关性,只能认为它们之间可能存在直接关系。可能得到如下图:

误导为 X 与 Y 有直接因果关系。
FCI算法:
FCI 可以检测到 X与 Y的相关性无法通过观测变量解释,因此使用 X\leftrightarrow Y表示它们之间可能存在潜在公共原因:

三、参考文献
PC算法详解 - 群青Bleu - 博客园 (cnblogs.com)
FCI — causal-learn 0.1.3.6 documentation
因果表征学习:问题,方法和应用 - 集智百科 - 复杂系统|人工智能|复杂科学|复杂网络|自组织 (swarma.org)

















 3197
3197



 到【灌水乐园】发言
到【灌水乐园】发言








