 GPOPS-II轨迹优化入门指南
GPOPS-II轨迹优化入门指南





1. 简介
GPOPS-II (General Purpose Optimal Control Software II) 是佛罗里达大学 Anil V. Rao 教授课题组开发的一款通用最优控制与轨迹优化工具箱
GPOPS-II的最大特色是:
- 基于 hp 自适应伪谱法(hp-adaptive pseudospectral method),能够灵活处理多阶段轨迹优化问题、提高轨迹优化问题求解精度
- 本质上是一个建模工具箱,用户只需要定义动力学方程、边界条件、目标函数,就能自动生成并求解非线性规划 (NLP) 问题。
- 底层调用 SNOPT 或 IPOPT 作为求解器 (后续会写介绍 IPOPT 的文章)
需要注意:
- 第一代GPOPS和早期GPOPS-II 有部分免费资源
- 最新版本(>=2.5)属于商业软件,大陆地区目前无法直接获得
官方网站:https://gpops2.com/
2. 快速入门
最好的学习路径就是 examples 文件夹,里面包含经典轨迹优化案例
这里以 Moon Lander Problem (月球软着陆问题) 为例
目标函数: J = ∫ 0 t f u ( t ) d t J=\int_0^{t_f}{u\left( t \right) dt} J=∫0tfu(t)dt
运动学方程: h ( t ) = v ( t ) v ( t ) = − g + u ( t ) \begin{array}{l} h\left( t \right) =v\left( t \right)\\ v\left( t \right) =-g+u\left( t \right)\\\end{array} h(t)=v(t)v(t)=−g+u(t)
边界条件: h ( 0 ) = h 0 , h ( t f ) = 0 v ( 0 ) = v 0 , v ( t f ) = 0 \begin{array}{l} h\left( 0 \right) =h_0, h\left( t_f \right) =0\\ v\left( 0 \right) =v_0, v\left( t_f \right) =0\\\end{array} h(0)=h0,h(tf)=0v(0)=v0,v(tf)=0
对应的GPOPS-II程序包含3个主要文件:
- moonlanderMain.m:主函数,定义问题结构与求解设置
- moonlanderContinuous.m:动力学函数,描述飞行器状态
- moonlanderEndpoint.m:终端函数,定义目标函数与终端条件
2.1 主函数:moonlanderMain.m
在主函数中,主要完成以下工作:选择 NLP 求解器、选择初始网格设置、定义变量的边界条件、给定初值与初始猜测、调用求解器求解(例如IPOPT)
轨迹优化入门必备 — IPOPT
可以看到,GPOPS-II 的建模流程和 AMPL / Pyomo 类似,但接口完全嵌入 MATLAB,非常直观
%----------------------- Moon-Lander Problem -----------------------------%
clear all; close all; clc;
% 求解选项设置
setup.name = 'moonlander';
setup.functions.endpoint = @moonlanderEndpoint;
setup.functions.continuous = @moonlanderContinuous;
setup.nlp.solver = 'ipopt';
setup.derivatives.supplier = 'sparseCD';
setup.derivatives.derivativelevel = 'second';
setup.scales.method = 'automatic-bounds';
setup.method = 'RPMintegration';
% 网格配置 (hp自适应)
setup.mesh.method = 'hp';
setup.mesh.tolerance = 1e-9; % default 1e-3
N = 1;
setup.mesh.phase.colpoints = 10*ones(1,N);
setup.mesh.phase.fraction = ones(1,N)/N;
% 问题参数设置
h0 = 10; hf = 0;
v0 = -2; vf = 0;
hmin = 0; hmax = 20;
vmin = -10; vmax = 10;
umin = 0; umax = 3;
t0min = 0; t0max = 0;
tfmin = 0; tfmax = 200;
% 初始状态和终端状态
setup.bounds.phase.initialstate.lower = [h0, v0];
setup.bounds.phase.initialstate.upper = [h0, v0];
setup.bounds.phase.state.lower = [hmin, vmin];
setup.bounds.phase.state.upper = [hmax, vmax];
setup.bounds.phase.finalstate.lower = [hf, vf];
setup.bounds.phase.finalstate.upper = [hf, vf];
% 控制约束
setup.bounds.phase.control.lower = [umin];
setup.bounds.phase.control.upper = [umax];
% 积分约束
setup.bounds.phase.integral.lower = [-100];
setup.bounds.phase.integral.upper = [100];
% 时间约束
setup.bounds.phase.initialtime.lower = t0min;
setup.bounds.phase.initialtime.upper = t0max;
setup.bounds.phase.finaltime.lower = tfmin;
setup.bounds.phase.finaltime.upper = tfmax;
% 初始猜测
h_guess = [h0; hf];
v_guess = [v0; vf];
u_guess = [umin; umin];
t_guess = [t0min; 5];
setup.guess.phase.state = [h_guess, v_guess];
setup.guess.phase.control = [u_guess];
setup.guess.phase.time = [t_guess];
setup.guess.phase.integral = 10;
setup.auxdata.g = 1.6;
% 调用求解器
output = gpops2(setup);
solution = output.result.solution;
2.2 动力学函数:moonlanderContinuous.m
该文件定义状态的微分方程,即系统的动力学约束
function phaseout = moonlanderContinuous(input)
g = input.auxdata.g;
t = input.phase.time;
h = input.phase.state(:,1);
v = input.phase.state(:,2);
u = input.phase.control(:,1);
dh = v;
dv = -g + u;
phaseout.dynamics = [dh, dv];
phaseout.integrand = u;
2.3 终端函数:moonlanderEndpoint.m
该文件定义目标函数和终端条件
在本问题中:
- 终端条件已在 main 文件的 bounds 中定义
- 这里仅定义目标函数,即推力积分最小化
function output = moonlanderEndpoint(input)
Qu = input.phase.integral;
output.objective = Qu;
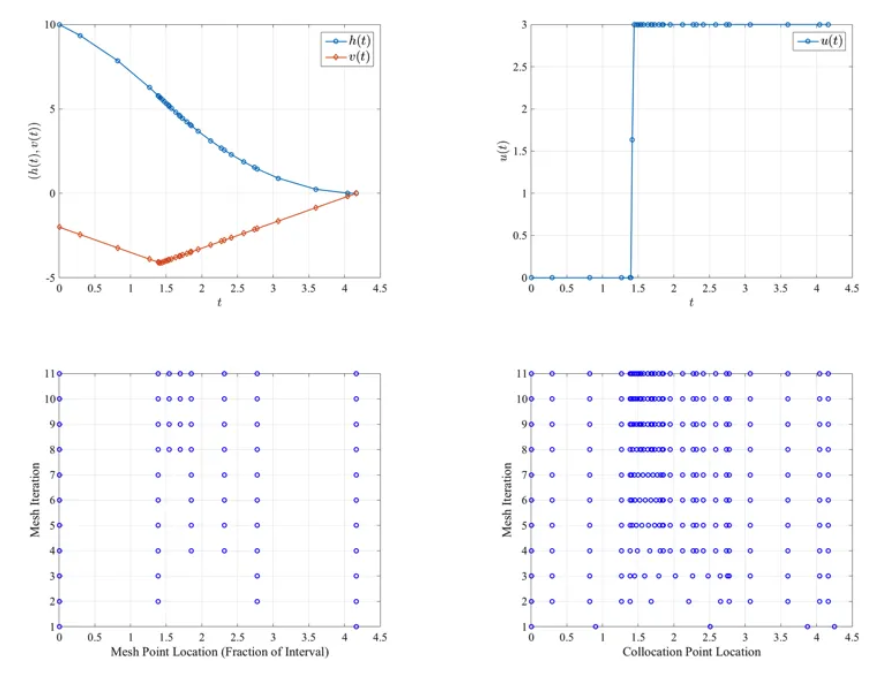
最终求解结果如下
3. 个人经验与踩坑
- 上手难度:建模相对简单,关键是清晰写出状态方程、边界条件
- 求解收敛性:初值和初始网格点对收敛极其关键;先用较松的 mesh调试,再逐步收紧
- 约束建模:要特别注意边界条件的合理性,否则很容易导致不可行解
- IPOPT 报错问题:在 MATLAB 下直接调用 IPOPT 可能报错
Invalid MEX-file error;推荐安装 OPTI Toolbox 来解决 MEX 接口问题
4. 总结
GPOPS-II 是一个非常强大的轨迹优化工具:
- hp-adaptive pseudospectral method 保证了高精度与高效率
- 适合处理多阶段、复杂约束的航天/航空/机器人轨迹优化问题
- 对新手友好,但要真正玩转,需要对最优控制建模和数值优化有一定理解
欢迎订阅,微信公众号同名
公众号文章

















 729
729

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









