







 超级会员免费看
超级会员免费看
 在ROS机器人导航过程中遇到错误:'Extrapolation Error',导致从odom到map的变换失败。错误指出在查找变换时需要未来时间的数据,而最新数据在请求时间之前。这可能是由于局部代价地图里程计坐标系设置不正确所引起。解决方案是修正第二行代码以解决坐标转换问题。
在ROS机器人导航过程中遇到错误:'Extrapolation Error',导致从odom到map的变换失败。错误指出在查找变换时需要未来时间的数据,而最新数据在请求时间之前。这可能是由于局部代价地图里程计坐标系设置不正确所引起。解决方案是修正第二行代码以解决坐标转换问题。
报错:
[ERROR] [1710509295.679888409, 296.695000000]: Extrapolation Error: Lookup would require extrapolation 0.003000000s into the future. Requested time 295.747000000 but the latest data is at time 295.744000000, when looking up transform from frame [odom] to frame [map]
[ERROR] [1710509295.679943474, 296.695000000]: Global Frame: odom Plan Frame size 20: map
[ WARN] [1710509295.679954597, 296.695000000]: Could not transform the global plan to the frame of the controller
原因:
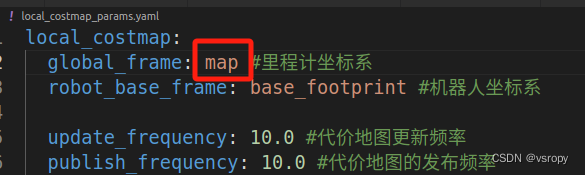
局部代价地图里程计坐标系错误local_costmap_params.yaml
将第二行global_frame: odom 改成 global_frame: map


















 595
595

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











