




 该代码示例展示了如何结合PyQt5创建GUI界面,通过ROS节点控制`turtle1`的速度,并订阅`turtle1/pose`话题以显示乌龟的实时位置信息。用户可以输入线速度和角速度,点击发送按钮来更新小乌龟的运动状态。
该代码示例展示了如何结合PyQt5创建GUI界面,通过ROS节点控制`turtle1`的速度,并订阅`turtle1/pose`话题以显示乌龟的实时位置信息。用户可以输入线速度和角速度,点击发送按钮来更新小乌龟的运动状态。
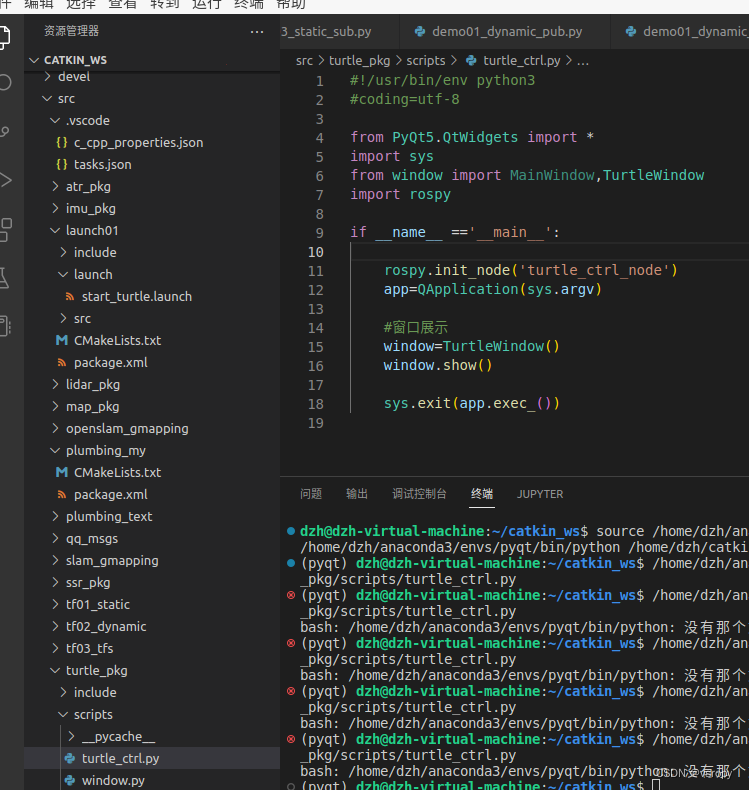
#!/usr/bin/env python3
#coding=utf-8
from PyQt5.QtWidgets import *
import sys
from window import MainWindow,TurtleWindow
import rospy
if __name__ =='__main__':
rospy.init_node('turtle_ctrl_node')
app=QApplication(sys.argv)
#窗口展示
window=TurtleWindow()
window.show()
sys.exit(app.exec_())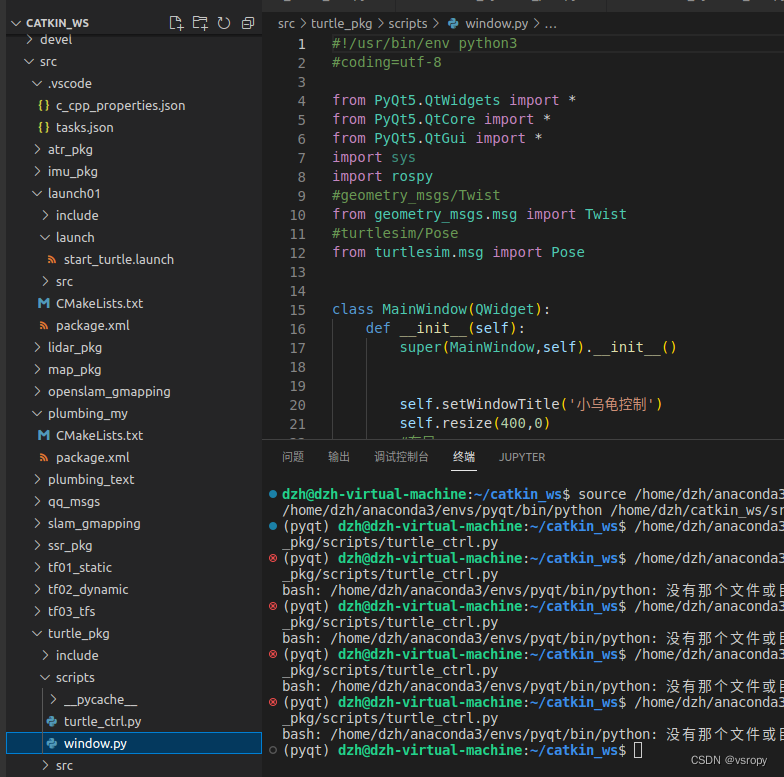
#!/usr/bin/env python3
#coding=utf-8
from PyQt5.QtWidgets import *
from PyQt5.QtCore import *
from PyQt5.QtGui import *
import sys
import rospy
#geometry_msgs/Twist
from geometry_msgs.msg import Twist
#turtlesim/Pose
from turtlesim.msg import Pose
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 1341
1341

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











