







物理引擎
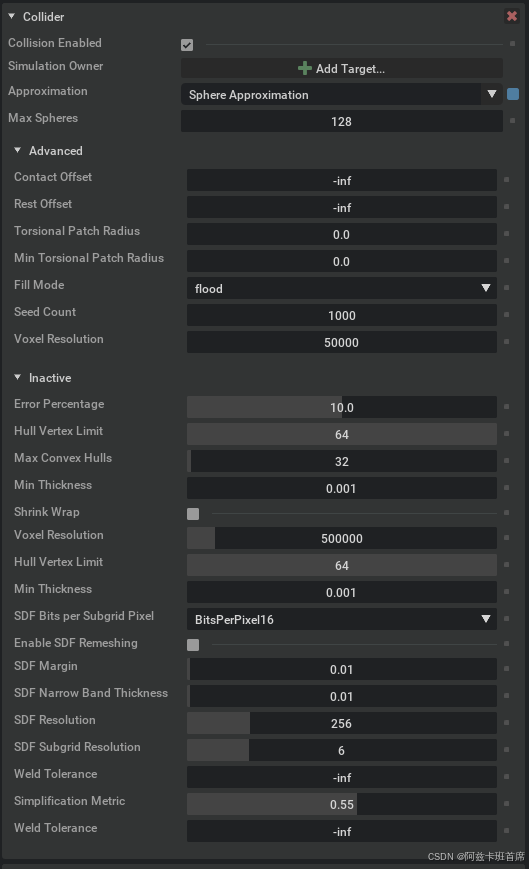
1. Collider(碰撞器):用于检测和响应碰撞的物体。它定义了物体的几何形状,以便进行物理碰撞检测。
2. Collision Enabled(启用碰撞):一个属性,用于确定物体是否参与碰撞检测。当启用时,物体可以与其他碰撞器发生碰撞。
3. Simulation Owner(仿真拥有者):指定哪个对象或系统负责控制物理仿真。通常用于多物体或复杂场景中,确保物理仿真的一致性。
4. Approximation(近似):在物理引擎中使用简化的数学模型来代替更复杂的几何形状,以提高计算效率。
高级设置
5. Advanced(高级设置):通常包含更加详细和专业的参数设置,用于微调物理仿真效果。
6. Contact Offset(接触偏移):控制碰撞检测中何时开始计算物体的接触。接触偏移值越大,物体会在彼此靠近时提前检测到碰撞。
7. Rest Offset(静止偏移):物体在碰撞后静止时的偏移距离。该值影响碰撞后的物体间距。
8. Torsional Patch Radius(扭转修补半径):用于在接触点附近施加扭转修补的半径,以改善扭转接触的仿真。
9. Min Torsional Patch Radius(最小扭转修补半径):设置扭转修补半径的下限,确保仿真中的接触点有最小的修补效果。
10. Weld Tolerance(焊接容差):在仿真中允许将两个顶点焊接在一起的距离。如果两个顶点之间的距离小于该容差,它们将被视为一个顶点。
其他设置
11. Inactive(非活动状态):物体或设置未被启用或当前不参与仿真。
12. Error Percentage(误差百分比):指定在碰撞检测或仿真中允许的最大误差百分比。用于权衡仿真精度和性能。
13. Hull Vertex Limit(凸壳顶点限制):在构建凸壳(用于碰撞检测的简单形状)时允许的最大顶点数量。
14. Max Convex Hulls(最大凸壳数量):指定在复杂物体的碰撞检测中可以使用的最大凸壳数量。
15. Min Thickness(最小厚度):设置物体的最小厚度,以确保在仿真中物体不被计算为过薄而影响结果。
16. Shrink Wrap(收缩包裹):将一个物体的表面紧贴到另一个物体的表面上,通常用于生成新的碰撞网格。
17. Voxel Resolution(体素分辨率):定义体素(用于体积表示的三维像素)网格的分辨率。体素分辨率越高,表示的细节越多。
18. SDF Bits Per Subgrid Pixel(每子网格像素的SDF位数):设置每个子网格像素的有符号距离场(SDF)精度。位数越高,SDF精度越高。
19. Enable SDF Remeshing(启用SDF重网格化):允许根据SDF(有符号距离场)重建网格,这可以提供更高的碰撞检测精度。
20. SDF Margin(SDF边距):在计算SDF时使用的边距大小,影响碰撞检测的敏感度。
21. SDF Narrow Band Thickness(SDF窄带厚度):定义SDF计算中的窄带厚度,该厚度影响仿真的碰撞检测范围。
22. SDF Resolution(SDF分辨率):设置用于计算SDF(有符号距离场)的分辨率。分辨率越高,生成的网格越精细。
23. SDF Subgrid Resolution(SDF子网格分辨率):指定SDF计算中的子网格分辨率,以提高某些区域的计算精度。
24. Fill Mode(填充模式):在物体的内外表面之间的填充方法。可能的模式包括实心填充或部分填充。
25. Max Spheres(最大球体数量):指定用于碰撞检测的最大球体数量,通常用于优化计算。
26. Seed Count(种子数量):用于初始化随机生成或优化算法的初始值数量。
27. Simplification Metric(简化度量):用于网格简化算法的指标,决定哪些部分可以被简化以减少计算复杂性。

















 5062
5062

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









