






1. FreeRTOS 中断管理
1.1 FreeRTOS 的中断管理
在 STM32 中,中断优先级是通过中断优先级配置寄存器的高 4 位 [7:4] 来配置的。因此 STM32 支持最多 16 级中断优先级,其中数值越小表示优先级越高,即更紧急的中断。(FreeRTOS 任务调度的任务优先级相反,是数值越大越优先,但是不要混淆了任务优先级和中断优先级,这俩者是不同的俩方面)
FreeRTOS 可以与 STM32 原生的中断机制结合使用,但它提供了自己的中断管理机制,主要是为了提供更强大和灵活的任务调度和管理功能。
FreeRTOS 中,将 PendSV 和 SysTick 设置最低中断优先级(数值最大,15),保证系统任务切换不会阻塞系统其他中断的响应。FreeRTOS 利用 BASEPRI 寄存器实现中断管理,屏蔽优先级低于某一个阈值的中断。比如: BASEPRI 设置为 0x50(只看高四位,也就是 5),代表中断优先级在 5~15 内的均被屏蔽,0~4 的中断优先级正常执行。(默认状态下不屏蔽所有中断)
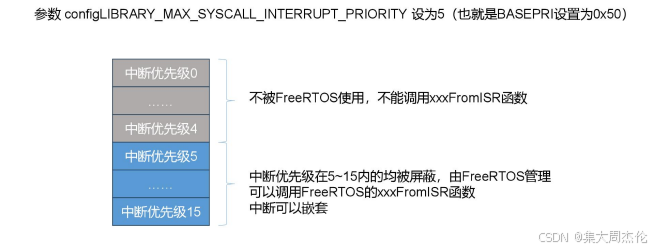
也就是如果启用中断屏蔽,中断事件的优先级设置为 >=5 时,程序不会响应这个中断请求,该中断请求内容被暂时挂起,只有当 BASEPRI 解除屏蔽(设回 0)后,挂起的中断才会执行。
在中断服务函数中调用 FreeRTOS 的 API 函数需注意:
- 中 断 服 务 函 数 的 优 先 级 需 在 FreeRTOS 所 管 理 的 范 围 内 , 阈 值 由configMAX_SYSCALL_INTERRUPT_PRIORITY 指定。
- 建议将所有优先级位指定为抢占优先级位,方便 FreeRTOS 管理。
- 在中断服务函数里边需调用 FreeRTOS 的 API 函数,必须使用带“FromISR”后缀的函数。
1.2 FreeRTOS 的屏蔽中断开关
FreeRTOS 屏蔽中断开关函数其实是宏定义,在 portmacro.h 中有定义,如下:
#define portDISABLE_INTERRUPTS() vPortRaiseBASEPRI()
#define portENABLE_INTERRUPTS() vPortSetBASEPRI( 0 )
调用 portENABLE_INTERRUPTS() , 会取消屏蔽所有 FreeRTOS 管理中断
调用 portDISABLE_INTERRUPTS() ,会屏蔽所有FreeRTOS 管理中断
1.3 FreeRTOS 的临界段代码
临界段代码,又称为临界区,指的是那些必须在不被打断的情况下完整运行的代码段。例如,某些外设的初始化可能要求严格的时序,因此在初始化过程中不允许被中断打断。在 FreeRTOS 中,进入临界段代码时需要关闭中断,在处理完临界段代码后再重新开启中断。FreeRTOS 系统本身包含许多临界段代码,并对其进行了保护。在编写用户程序时,有些情况下也需要添加临界段代码以确保代码的完整性。
与临界段代码保护有关的函数有 4 个:
- taskENTER_CRITICAL() :进入临界段。
- taskEXIT_CRITICAL() :退出临界段。
- taskENTER_CRITICAL_FROM_ISR() :进入临界段(中断级)。
- taskEXIT_CRITICAL_FROM_ISR():退出临界段(中断级)。
执行进入临界段函数,实际上会调用 portDISABLE_INTERRUPTS() 来屏蔽 FreeRTOS 所管理的中断,执行退出临界段函数会调用 portENABLE_INTERRUPTS() 来失能屏蔽管理的中断。
临界段函数嵌套使用:
进入和退出临界段是成对使用的。每进入一次临界段,全局变量 uxCriticalNesting 都会加一,每调用一次退出临界段,uxCriticalNesting 减一,只有当 uxCriticalNesting 为 0 的时候才会调用函数 portENABLE_INTERRUPTS()使能中断。这确保了在存在多个临界段代码的情况下,不会因为某个临界段代码的退出而破坏其他临界段的保护。只有当所有的临界段代码都退出时,中断才会被重新使能。
1.4 实验目标
- 设置管理的优先级范围:5~15。
- 使用两个定时器,一个优先级为 4,一个优先级为 6。
- 两个定时器每 1s,打印一段字符串。
- task1:按下 KEY1,关中断,按下 KEY2,开中断。
注意!!!:为了正确观察实验现象,不要调用 freertos 的延时函数,底层会去调用 portENABLE_INTERRUPTS() 函数!!!
具体调用关系为:
vTaskDelay -> taskEXIT_CRITICAL -> taskEXIT_CRITICAL(同 vPortExitCritical) -> portENABLE_INTERRUPTS这样子会导致使用 vTaskDelay 会自动区别屏蔽管理的所以中断,导致实验不符合预期
1 ) 中断回调函数:
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if (htim->Instance == TIM4)
{
scan_keypad();
}
if (htim->Instance == TIM2)
{
printf("TIM2 priority 4, running... \r\n");
}
if (htim->Instance == TIM3)
{
printf("TIM3 priority 6, running... \r\n");
}
if (htim->Instance == TIM1) {
HAL_IncTick();
}
}
2 )初始化函数:
HAL_TIM_Base_Start_IT(&htim2);
HAL_TIM_Base_Start_IT(&htim3);
HAL_TIM_Base_Start_IT(&htim4);
HAL_UART_Init(&huart1);
3 )任务函数:
void task(void *pvParameters)
{
while (1)
{
for (int i = 0; i < 16; i++)
{
if (key[i].flag == 1)
{
if (i == 0)
{
printf("Disable Interrupt Masking....\r\n");
portDISABLE_INTERRUPTS();
}
else if (i == 1)
{
printf("Enable Interrupt Masking...\r\n");
portENABLE_INTERRUPTS();
}
key[i].flag = 0;
}
}
/* 使用 HAL_Delay 前提:HAL 时钟修改成其他定时器(非sysTick),并且中断优先级高于 freertos 的管理范围 */
HAL_Delay(100);
}
}
1.5 总结建议
- 可以设置中断优先级高于 FreeRTOS 管理的最高中断优先级的 ISR,但是不能在这些高优先级 ISR 里调用 FreeRTOS API,否则会破坏系统的稳定性和任务调度。
如果 ISR 必须使用高优先级(高于FreeRTOS管理最高优先级),且仍然需要执行 FreeRTOS 相关操作,可以 让高优先级 ISR 只设置标志位,然后让低优先级任务来调用 FreeRTOS API:
volatile bool exti0_flag = false;
void EXTI0_IRQHandler(void)
{
// 高优先级 ISR 仅设置标志位,不调用 FreeRTOS API
exti0_flag = true;
}
void exti_task(void *pvParameters)
{
while (1)
{
if (exti0_flag)
{
exti0_flag = false;
xQueueSend(myQueue, &data, portMAX_DELAY); // 任务调用 FreeRTOS API
}
vTaskDelay(10);
}
}

















 2839
2839

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









