




 本文介绍了如何将优化问题推广到动态离散系统中,通过拉格朗日乘子法和Hamilton函数处理约束,解决从初始状态到终端状态的最优控制问题。讨论了确定性和不确定性边界条件下的控制策略,以及协状态在求解中的作用。
本文介绍了如何将优化问题推广到动态离散系统中,通过拉格朗日乘子法和Hamilton函数处理约束,解决从初始状态到终端状态的最优控制问题。讨论了确定性和不确定性边界条件下的控制策略,以及协状态在求解中的作用。
2.离散系统最优控制
说明:
将前述优化问题推广到动态系统中去,其中的约束f(x,u)f(x,u)f(x,u)变成了由系统物理约束等固有条件决定的。
2.1 解决常规离散系统的最优化问题
(1) 目标:
对于一般的离散系统(约束):

其初态为x0x_0x0,定义其[i,N][i,N][i,N]时刻内的优化指标为:

(此处的优化指标由自己定义,前半部分是期望达到的目标,后半部分是控制的程度,不同的问题优化指标的设置不同)
最优控制问题是寻找[i,N][i,N][i,N]内的控制uk∗u^*_kuk∗,使系统沿着轨迹xk∗x^*_kxk∗让优化指标JiJ_iJi达到最优。
(2)过程:
基于静态优化的思想,对比(2.1-1)所示系统与前述约束,需要给每一个时刻k的约束都设置一个对应的拉格朗日乘子,因此优化指标变成:

引入Hamiltion函数:

则式(2.1-3)变成:

其全微分形式(注意角标变换)为:

当极值点时,应该有Jλk=Ju=Jxk=0J_{\lambda_k}=J_u=J_{x_k}=0Jλk=Ju=Jxk=0,因此可以得到:
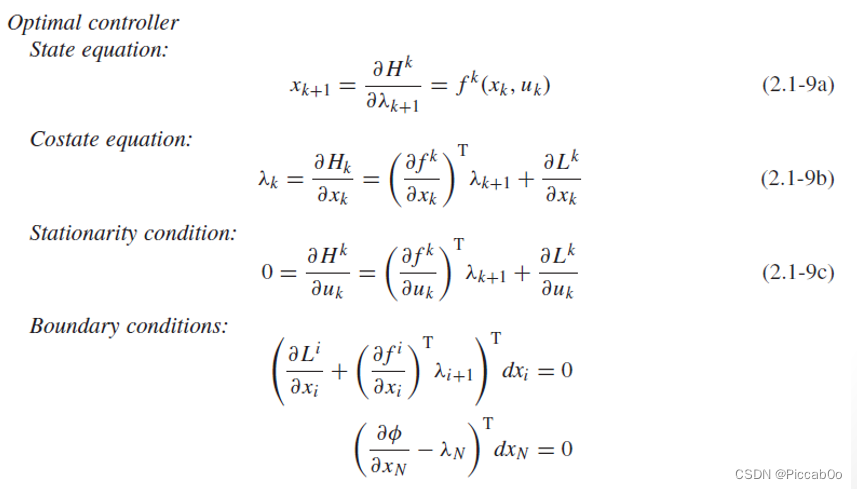
(拉格朗日乘子由系统运动状态定义,故也称伴随系统)
从上式中可以看出求解讨论的基本逻辑:
对于两个边界条件存在确定和不确定两种可能性,因此需要分类讨论。
一般我们已知iii时刻的状态xix_ixi,因此dxi=0dx_i=0dxi=0,初始条件恒成立,只需要考虑终端状态xNx_NxN的两种可能:
当xNx_NxN确定时,用期望的末态值rNr_NrN作为终端条件;
当xNx_NxN不确定时,需要终端条件变成λN\lambda_NλN。
虽然并不关心协状态λk\lambda_kλk的值,但是必须要先求出其才能求出系统的控制uk∗u^*_kuk∗,进而得知系统的运动状态xk∗x^*_kxk∗。
(3)举例:
Page79−Page91Page_{79}-Page_{91}Page79−Page91举了确定末态值的情况,发现协状态λN\lambda_NλN与rN−aNx0r_N-a^Nx_0rN−aNx0成比例,控制也与之有关(基于离目标的偏差)。
Page92−Page99Page_{92}-Page_{99}Page92−Page99举了末态值不固定的情况。


















 927
927

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









