






Haar小波
小波变换由一堆小波基和其系数组成,小波基又分为母小波(低频的)和父小波(高频的)。
常用于二维图形处理的小波变换是Haar小波变换,Haar小波变换具有压缩比、抗干扰、速度快的特点,经过小波变换后的系数数据会变得具有规律性,方便后续处理算法进行压缩,同时一些值较小的分量置0不影响图片整体观感。
截取了PCL-AVS-PCC一段小波变换点云压缩的代码
void WaveletCoreTransform(FXPoint* attributes, const int attribCount, const int voxelCount,
int* integerizedAttributes) {//attribCount=1
size_t M, N;
size_t S, d, i, j;
N = voxelCount;
FXPoint* attributesTransformed = new FXPoint[voxelCount * attribCount];
d = 0; // 层数
while (N > 1) {
d++;
i = 0; //attributes 当前节点
M = 0; //attributesTransformed 当前节点
S = N; //当前层节点数
while (i < S) {
FXPoint attributes222[3][2] = {};
for (int k = 0; k < attribCount; k++) {
attributes222[k][0] = attributes[i * attribCount + k];
attributes222[k][1] = attributes[(i + 1) * attribCount + k];
}
N--;
i += 2;
fwdTransform2Node(attribCount, attributes222);
for (int kk = 0; kk < attribCount; kk++) {
attributesTransformed[M * attribCount + kk] = attributes222[kk][0];
attributesTransformed[N * attribCount + kk] = attributes222[kk][1];
}
M++;
if (i == S - 1) {//奇数个节点
for (size_t k = 0; k < attribCount; k++) {
attributesTransformed[M * attribCount + k] = attributes[i * attribCount + k];
attributesTransformed[M * attribCount + k] *= FXPoint(1.41421356);
}
i++;
M++;
}
}
i = S * attribCount;
j = N * attribCount;
while (i-- > j)
attributes[i] = attributesTransformed[i];
std::swap(attributes, attributesTransformed);
}
if (d % 2) {
attributesTransformed[0] = attributes[0];
std::swap(attributes, attributesTransformed);
}
delete[] attributesTransformed;
for (i = 0; i < voxelCount; i++)
for (size_t k = 0; k < attribCount; k++) {
integerizedAttributes[i + voxelCount * k] = attributes[i * attribCount + k].round();
}
}代码逻辑讲解:
attributes数组存放所有属性,attributesTransformed数组与attributes等长,用于存放变换结果。最外层循环进行的条件是当前处理的节点数N>1,内层循环进行的条件是当前处理的节点索引i未大于当前层节点数S,取出待处理的i和i+1处的attributes,进行haar小波变换得到均值和差值的均值,N--,i+=2,haar变换后得到的值,均值放入attributesTransformed[M],差值的均值放入attributesTransformed[N],M++(N和M可以看做用来存放结果的游标,i则是读取属性的游标)。如果当前层的节点数是奇数个,直接将最后一个节点的值当做均值存储(假设有五个节点,则存储数组3+2,3个存均值,2个存差值)。
对应的逆变换:
void WaveletCoreInverseTransform(FXPoint* attributes, const int attribCount, const int voxelCount,
int* integerizedAttributes) {
size_t M, N;
size_t S, d, i;
M = N = voxelCount;
FXPoint* attributesTransformed = new FXPoint[voxelCount * attribCount];
for (i = 0; i < voxelCount; i++)
for (size_t k = 0; k < attribCount; k++) {
attributesTransformed[i * attribCount + k] =
FXPoint(integerizedAttributes[i + k * voxelCount]);
}
size_t S_buffer[32] = {};
// compute number of nodes for each level
d = 0;
while (N > 1) {
S_buffer[d] = M;
d++;
if (M % 2)
M = M / 2 + 1;
else
M = M / 2;
N = M;
}
// Inverse transform
while (d--) {
S = S_buffer[d]; //当前层节点数
M = 0;
N = S;
i = 0;
while (i < S) {
int flag = i;
FXPoint attributes222[3][2] = {0};
N--;
for (int k = 0; k < attribCount; k++) {
attributes222[k][0] = attributesTransformed[M * attribCount + k];
attributes222[k][1] = attributesTransformed[N * attribCount + k];
}
invTransform2Node(attribCount, attributes222);
for (int kk = 0; kk < attribCount; kk++) {
attributes[i * attribCount + kk] = attributes222[kk][0];
attributes[(i + 1) * attribCount + kk] = attributes222[kk][1];
}
M++;
i += 2;
if (i == S - 1) {
for (size_t k = 0; k < attribCount; k++) {
attributes[i * attribCount + k] = attributesTransformed[M * attribCount + k];
attributes[i * attribCount + k] /= FXPoint(1.41421356);
}
i++;
M++;
}
}
i = S * attribCount;
while (i--)
attributesTransformed[i] = attributes[i];
}
delete[] attributesTransformed;
}RAHT
Region -adaptive Haar(or hierarchical ) transform 一种区域自适应的哈尔(或层级)变换,目前仍旧是时间复杂度、压缩信噪比的SOTA,于2016年发表于Trans on Image Processing,目前已有三百多次引用。
核心算法区域自适应变换的motivation:
对于三维点云的属性压缩与二维图片的属性压缩不同点在于,三维点云并不紧凑,不能保证每个点都有数据,因此无法直接使用DCT变换进行压缩。
但是本文使用八叉树对每个点进行划分,每个点划定得到的八叉树网格具有最小的Voxel,通过这个最小的Voxel可以把空间点云划分成均匀的voxels,每个voxels存在occupied 和unoccupied两种不同属性。在二维图片的小波变换中,不允许出现空洞和不存在的值的pixels,但是三维空间中存在没有值的Voxels。如何解决这个问题?作者举了一个二维的例子,
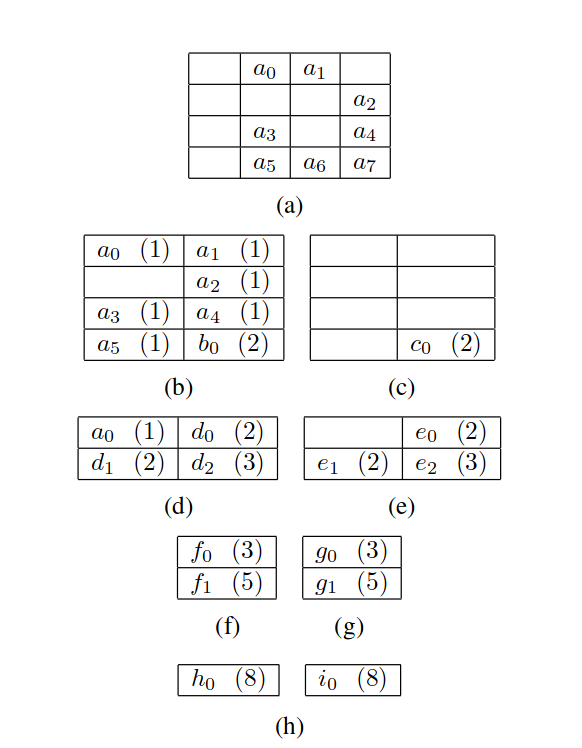
对于一个2D平面(a),并不是所有的区域都存在a,a可以认为是一个点云的属性,所有的a的权重w一开始都是1。图(a)进行水平方向上的变换,两两聚合,对于都存在a的区域,使用变换公式进行计算,并在对应的H(高频信息集合)中填上高频信息;对于只存在一个a的区域,a保持不变;对于都不存在a的区域,保持空。在上图(b)中可以看到,聚合后的b0以及H对应位置所填写的系数c0,权重w等于原来的两个权重w相加。再进行竖直方向聚合,聚合结果如(d)(e)所示。最后,所有区域将会被聚合成样本均值h0,在保存和传输时,只需要记录下h0,i0,g0,g1,e0,e1,e2,c0即可复原出所有的颜色!
只是进行了变换,就能压缩颜色了吗?
由于颜色提取到了变换域,对于较小的变换系数的改变对整体颜色的影响较小,同时变换系数数值间更为接近,提高了压缩效率。压缩是对变换的系数进行量化和编码。
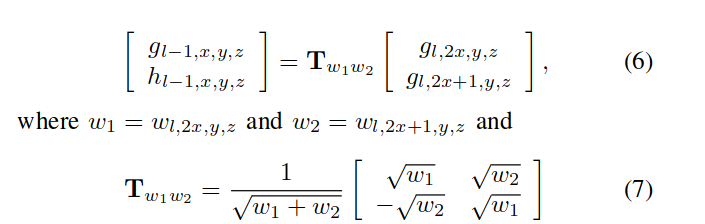
为什么只需要记录这几个系数,不需要记录权重w就能进行逆变换呢,变换矩阵不是w组成的吗?
其实w来自于几何信息,几何信息复原了,生成了八叉树记录下占据网格后,不需要颜色属性也能计算出w来。
上述的例子只是二维平面上的,怎么对应到三维空间中呢?
小波变换具有线性性,可以先沿着x轴这个维度做上述变换,再y,z轴做同样的一维变换即可,或者先做2D变换,再做1D变换也行,顺序改变不会影响变换结果。
参考资料:

















 404
404

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









