







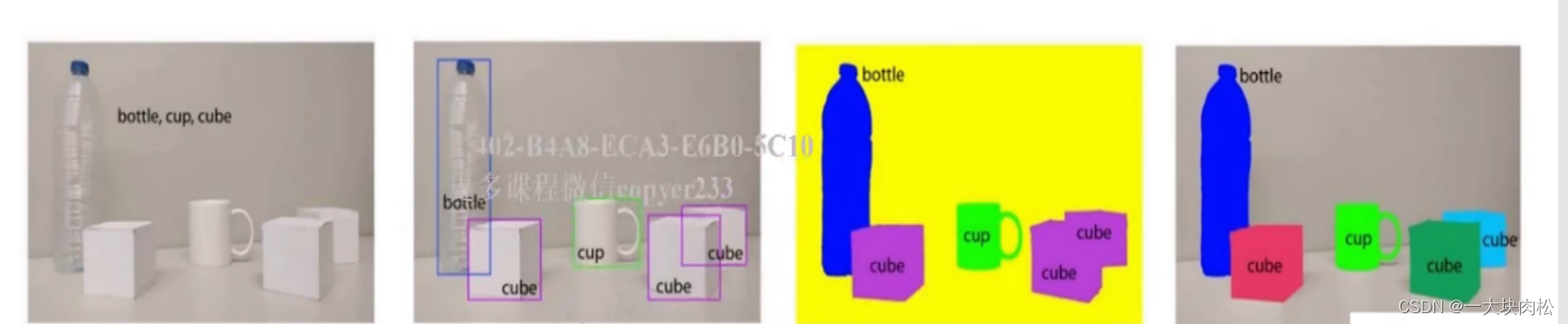
 本文介绍了图像分类、目标检测和分割的区别,并详细讲解了目标检测中的Two-Stage和One-Stage算法。重点讨论了R-CNN(Region with CNN features)的工作流程,包括SelectiveSearch生成候选框、CNN特征提取、SVM分类和边界框回归。此外,还对比了R-CNN与YOLO、SSD等One-Stage算法的区别。
本文介绍了图像分类、目标检测和分割的区别,并详细讲解了目标检测中的Two-Stage和One-Stage算法。重点讨论了R-CNN(Region with CNN features)的工作流程,包括SelectiveSearch生成候选框、CNN特征提取、SVM分类和边界框回归。此外,还对比了R-CNN与YOLO、SSD等One-Stage算法的区别。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















12-08
 1777
1777
1777
06-21
2202
2202
11-04
3629
3629
03-01
5653
5653
07-29
7800
7800
12-20
09-18
977
977
10-28
1208
1208
05-09
9488
9488
08-09
6201
6201

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









