




一、提前了解
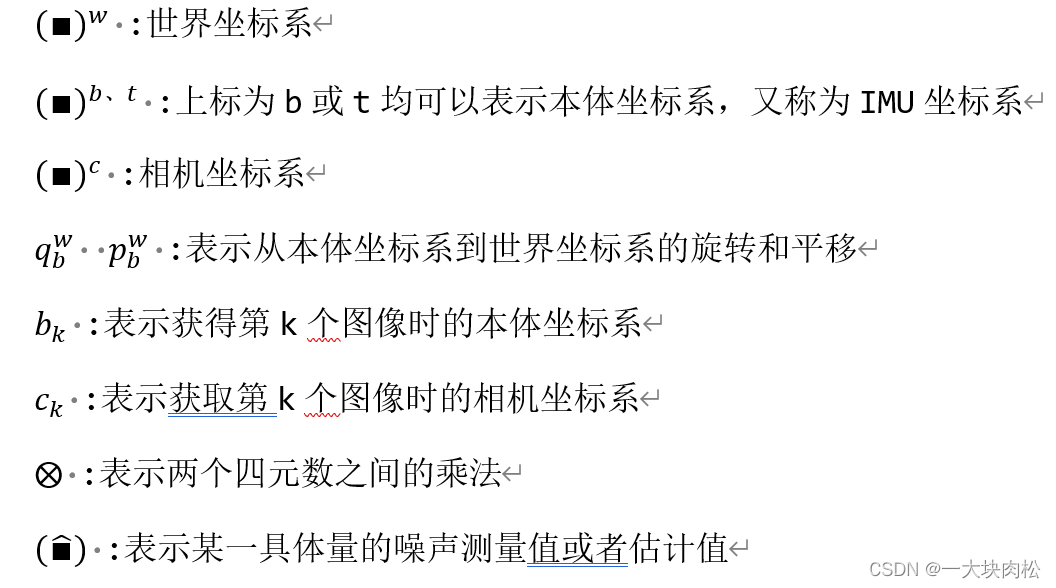
二、预积分的目的
1.IMU通过加速度计和陀螺仪测出的是加速度和角速度,通过积分获得两帧之间的旋转和位移的变换;
2.在后端非线性优化的时候,需要优化位姿,每次调整位姿都需要在它们之间重新传递IMU测量值,需要重新积分,这将非常耗时,为了避免重新传递测量值,所以采取预积分策略。
三、进入预积分主题
1.IMU模型
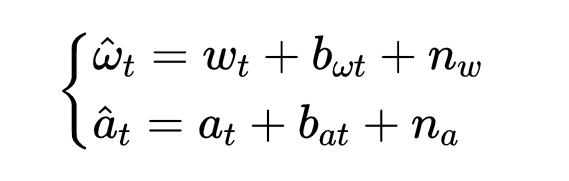
其中:

2.当前时刻的PVQ的连续表达形式
对图像第 k k k 帧和第 k + 1 k+1 k+1 帧之间的所有IMU进行积分,对应的IMU坐标系为 b k b_k bk 和 b k + 1 b_{k+1} bk+1 ,根据k时刻的数据,积分求得 k + 1 k+1 k+1 时刻的数据,求出的是在世界坐标系下的值:
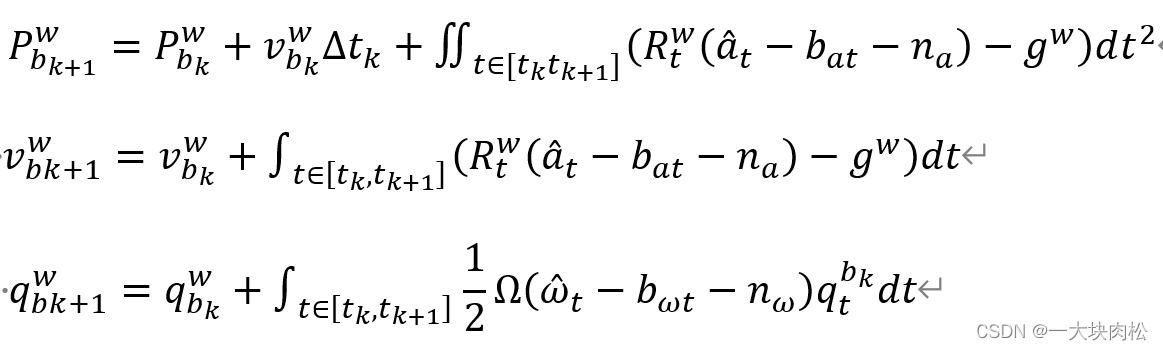
其中:
Δ t k Δt_k Δtk :表示[k,k+1]之间的时间间隔
q t b k q^{bk}_t qtbk:表示在本体(IMU)坐标系下,t 时刻到 b k b_k bk时刻位姿的变换矩阵 。
推导过程中旋转采用四元数表示。
对于上式中,第三个公式的推导过程如下:
首先需要先了解四元数的基本知识:
(1)四元数由实部和虚部构成,可以将实部写在前面,也可以将虚部写在前面,本文将实部写在前面:
q = [ q 0 , q 1 , q 2 , q 3 ] = [ s , v ⃗ ] q=[q_0,q_1,q_2,q_3]=[s,\vec{v}] q=[q0,q1,q2,q3]=[s,v]
即: q = q 0 + q 1 i + q 2 j + q 3 k q=q_0+q_1i+q_2j+q_3k q=q0
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2533
2533

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









