







笛卡尔阻抗控制是一种重要的机器人控制策略,它特别关注于机器人末端执行器在笛卡尔空间(即任务空间)内的动态特性,以实现与环境的柔顺交互。
一、定义与背景
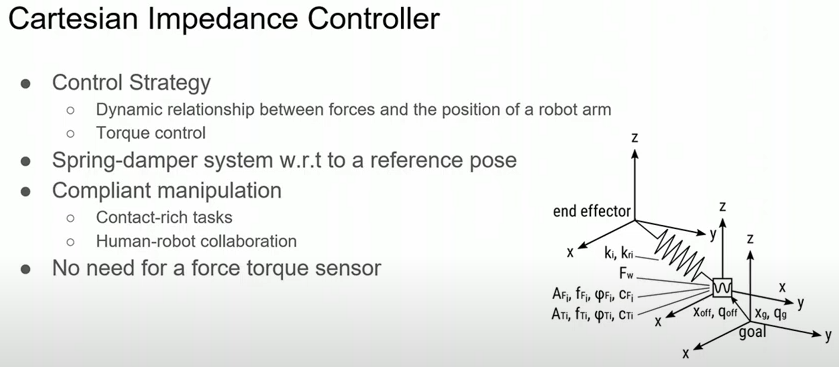
- 笛卡尔空间:指机器人末端执行器(如手爪、工具等)所处的三维空间,通常以X、Y、Z坐标表示。
- 阻抗控制:旨在通过调整机器人的行为,以维持一个由弹簧-阻尼-质量组成的二阶系统的理想动态关系。这种控制方法不是直接控制机器人的运动或其与外界的接触力,而是控制这二者之间的动态关系。
- 笛卡尔阻抗控制:将阻抗控制的概念应用于笛卡尔空间,即关注机器人末端执行器在笛卡尔空间内的每个方向上都体现出由弹簧-阻尼-质量组成的二阶系统的动态特性。
二、控制目标
笛卡尔阻抗控制的目标是实现机器人末端执行器在笛卡尔空间中的期望阻抗表现,这通常通过调整末端执行器的位置、速度和加速度来实现。具体来说,控制目标是实现末端执行器位置误差(实际位置与期望位置之差)与外部作用力之间的某种期望动力学关系,如质量-弹簧-阻尼系统所描述的关系。
三、实现方法
- 动力学模型转换:机器人的动力学模型通常表示为关节空间中的形式,但在笛卡尔阻抗控制中,需要将模型转换到任务空间(即笛卡尔空间)中。
- 雅可比矩阵:通过雅可比矩阵J(q),可以实现关节空间到笛卡尔空间的映射,即x˙=J(q)q˙,其中x为笛卡尔坐标,q为关节变量。
- 控制律设计:根据期望的阻抗表现(如期望的惯性、阻尼和刚度),设计相应的控制律。这通常涉及到对机器人动力学方程的重新表述和求解。
四、应用实例
笛卡尔阻抗控制广泛应用于需要机器人与环境进行柔顺交互的场景中,如机器人装配、搬运、医疗手术等。例如,在机器人手术中,医生可以通过调整机器人的阻抗参数来控制手术器械的柔顺性,从而更精确地完成手术操作。
笛卡尔阻抗控制是一种重要的机器人控制策略,它通过调整机器人末端执行器在笛卡尔空间中的动态特性来实现与环境的柔顺交互。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 920
920

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









