






 本文介绍了如何在ROS环境下安装、测试及创建功能包,展示如何将Odometry数据转换并通过Rviz显示RTK轨迹,以及如何在VSCode中管理项目。
本文介绍了如何在ROS环境下安装、测试及创建功能包,展示如何将Odometry数据转换并通过Rviz显示RTK轨迹,以及如何在VSCode中管理项目。
0、前期准备
首先我们需要安装ROS、并用小乌龟测试是否能正常运行。此外,还需要测试RVIZ是否能正常工作。
1、RTK轨迹(GT)显示
首先,创建工作空间showTrack_ws
mkdir -p showTrack_ws/src
cd showTrack_ws
catkin_make
进入工作空间后,可以用两种方法创建功能包。这里推荐方法二,因为后续都是通过Vscode完成的,更加直观。
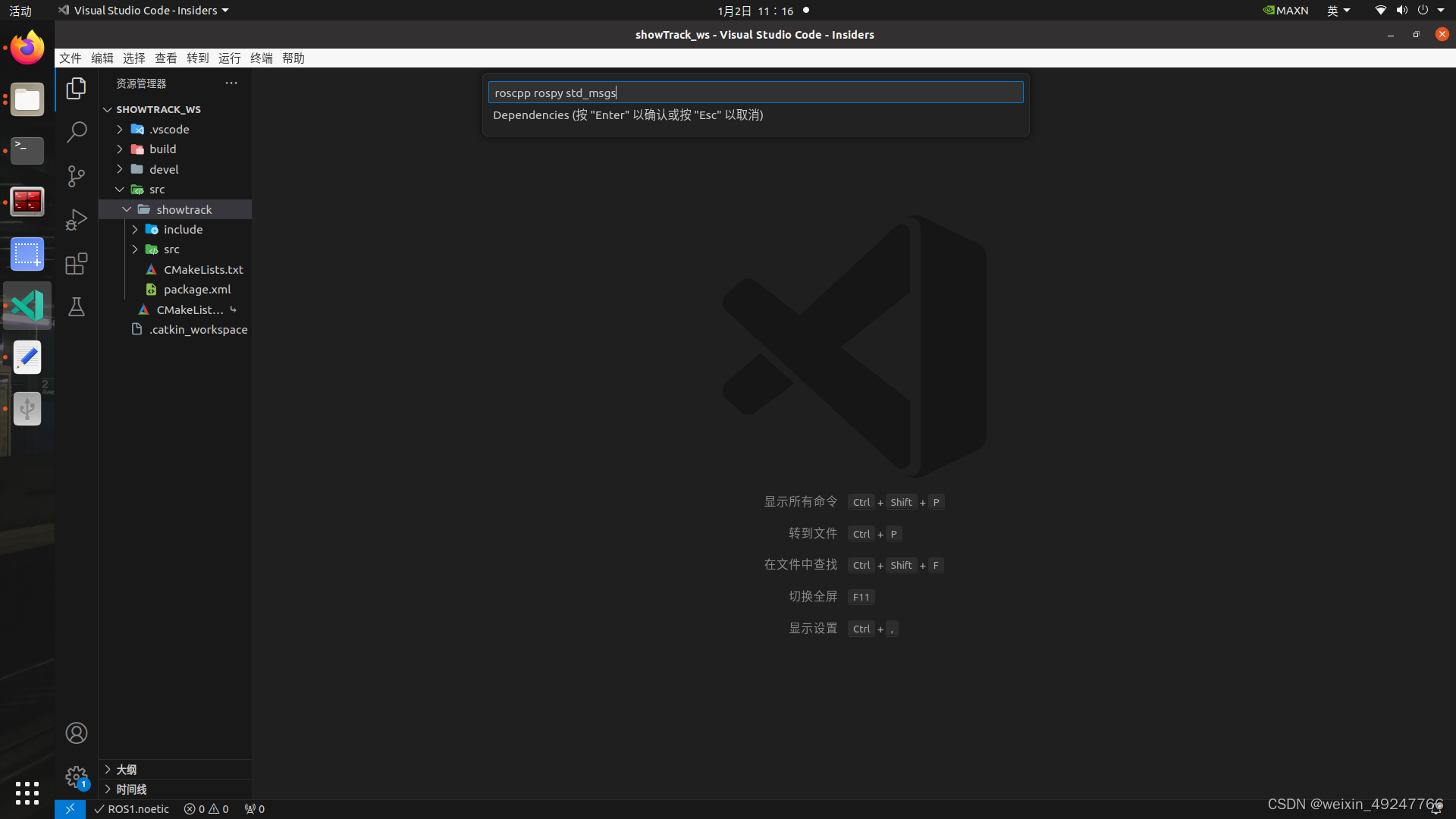
方法一:直接创建(showtrack是功能包名字,roscpp、rospy、std_msgs是编译依赖)
catkin_create_pkg showtrack roscpp rospy std_msgs
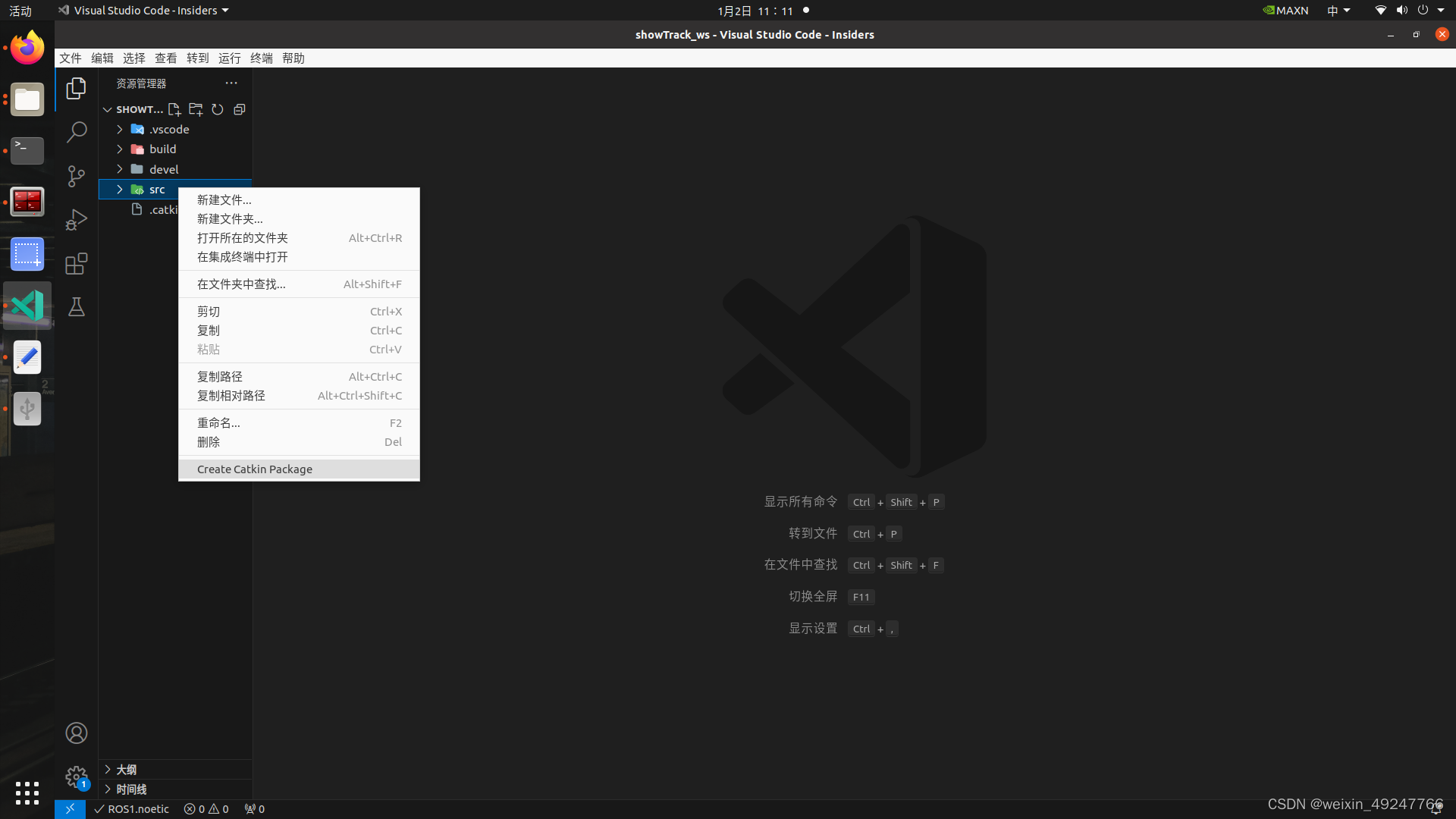
方法二:进入Vscode创建功能包,在工作空间下执行命令
code .
选择创建功能包
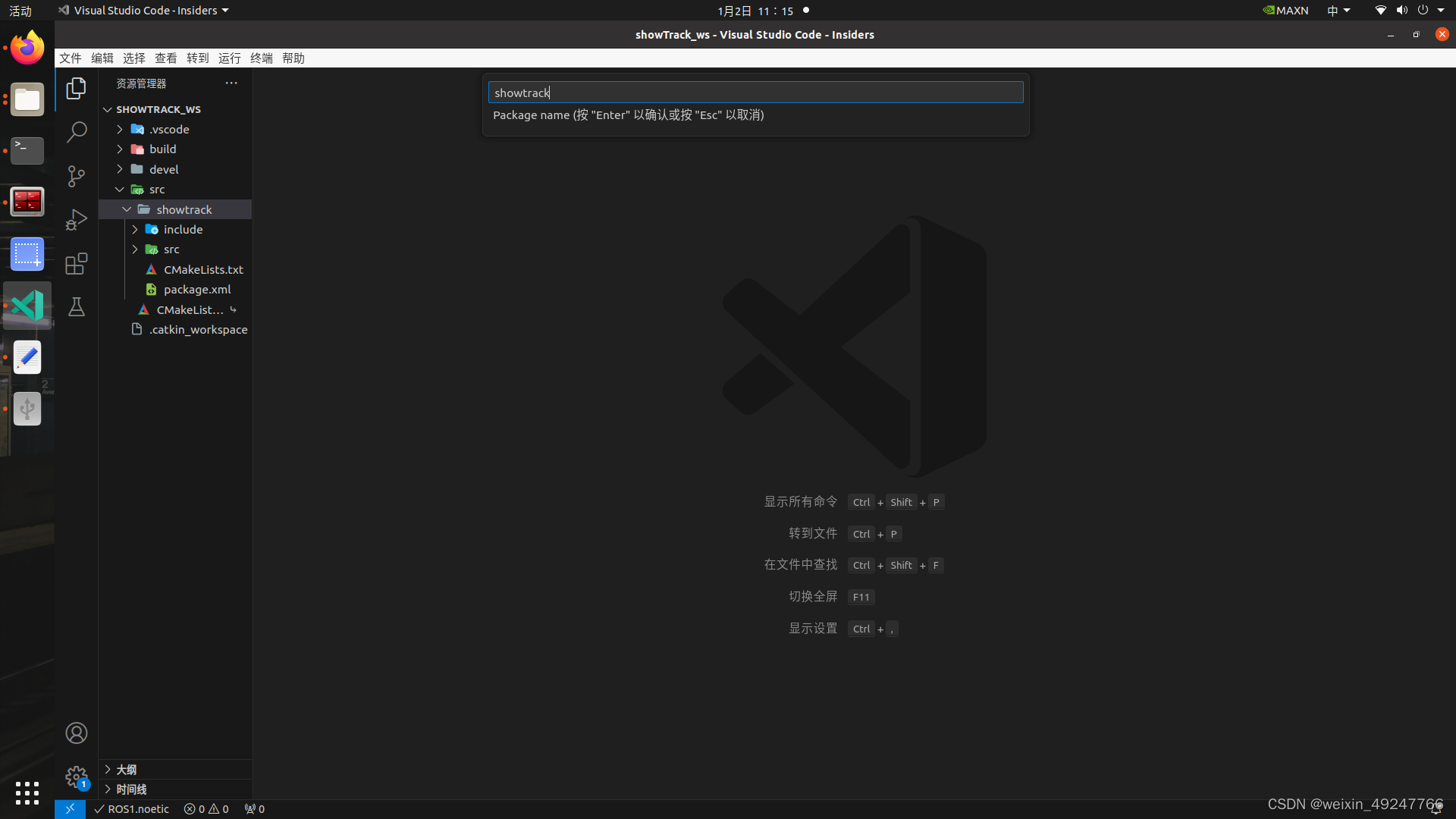
创建功能包后会先设置功能包名称,再给定功能包依赖。名称依赖项如方法一所示。
名称:
依赖:
创建完成后左侧应该是这样子的

我们在showtrack功能包的src下创建showtrack.cpp,并把以下内容复制在cpp文件里:
#include<stdio.h>
#include<ros/ros.h>
#include<nav_msgs/Path.h>
#include<nav_msgs/Odometry.h>
#include <iostream>
#include <vector>
#include <algorithm>
#include <Eigen/Core>
#include <Eigen/Geometry>
#include <cmath>
using namespace std;
using namespace Eigen;
ros::Publisher path_pub; //发布path的节点
ros::Subscriber odom_sub; //接收odometry的节点
nav_msgs::Path path; //发布的路径
bool init_flag=1; //path初始化标记位
void odomCallback(const nav_msgs::Odometry::ConstPtr& odom){
if(init_flag){
path.header=odom->header;
init_flag=0;
}
geometry_msgs::PoseStamped pose_stamped_this;
pose_stamped_this.header=odom->header;
pose_stamped_this.header.frame_id="world";
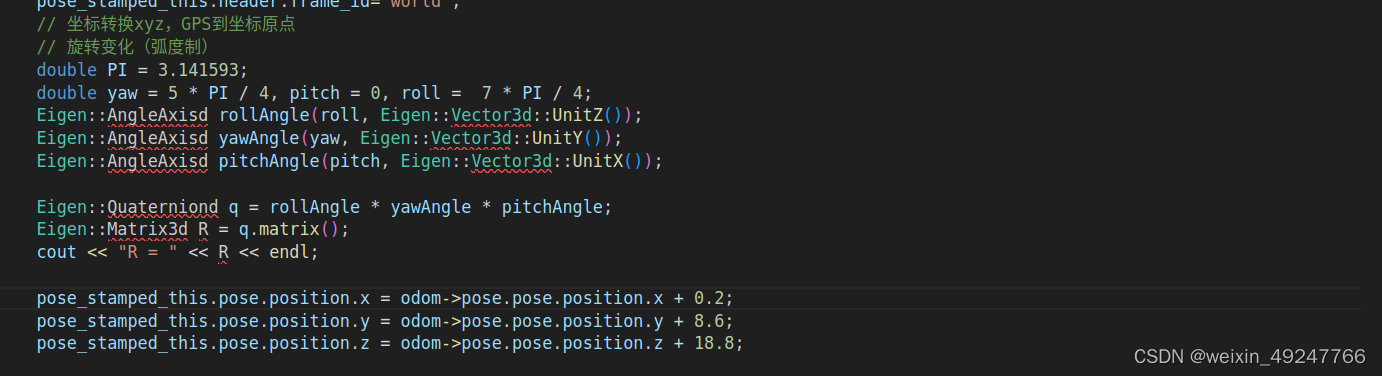
// 坐标转换xyz,GPS到坐标原点
// 旋转变化(弧度制)
double PI = 3.141593;
double yaw = 5 * PI / 4, pitch = 0, roll = 7 * PI / 4;
Eigen::AngleAxisd rollAngle(roll, Eigen::Vector3d::UnitZ());
Eigen::AngleAxisd yawAngle(yaw, Eigen::Vector3d::UnitY());
Eigen::AngleAxisd pitchAngle(pitch, Eigen::Vector3d::UnitX());
Eigen::Quaterniond q = rollAngle * yawAngle * pitchAngle;
Eigen::Matrix3d R = q.matrix();
cout << "R = " << R << endl;
pose_stamped_this.pose.position.x = odom->pose.pose.position.x + 0.2;
pose_stamped_this.pose.position.y = odom->pose.pose.position.y + 8.6;
pose_stamped_this.pose.position.z = odom->pose.pose.position.z + 18.8;
Vector3d pose = {pose_stamped_this.pose.position.x, pose_stamped_this.pose.position.y, pose_stamped_this.pose.position.x};
pose = R * pose;
pose_stamped_this.pose.position.x = pose[0];
pose_stamped_this.pose.position.y = pose[1];
pose_stamped_this.pose.position.z = pose[2];
path.header.frame_id = "world";
path.poses.push_back(pose_stamped_this);
path_pub.publish(path);
}
int main (int argc, char **argv)
{
ros::init (argc, argv, "odometry2path");
ros::NodeHandle nh;
// 记得在此处更改odometry消息topic名称 //
odom_sub = nh.subscribe<nav_msgs::Odometry>("/USV2/NED_odometry", 10, odomCallback);
path_pub = nh.advertise<nav_msgs::Path>("/USV2/NED_path",10, true);
ros::spin();
// ros::Rate loop_rate(50);
// loop_rate.sleep();
return 0;
}
复制完成后需要修改功能包路径下的CMakeList文件,
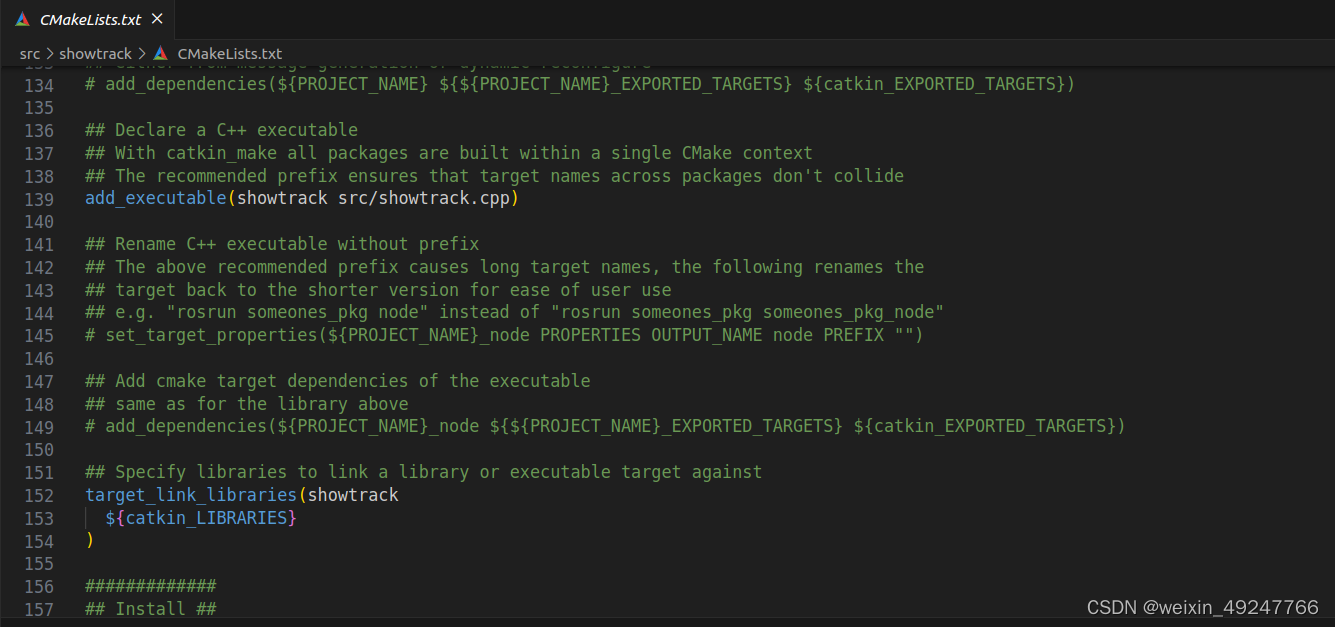
之后在直接ctrl+shift+B快捷键调用catkin_make命令编译即可(如果提示需要选择生成的任务类型,选择catkin_make:build即可)。之后在工作空间下执行以下命令运行ros节点:

source ./devel/setup.bash
rosrun showtrack showtrack
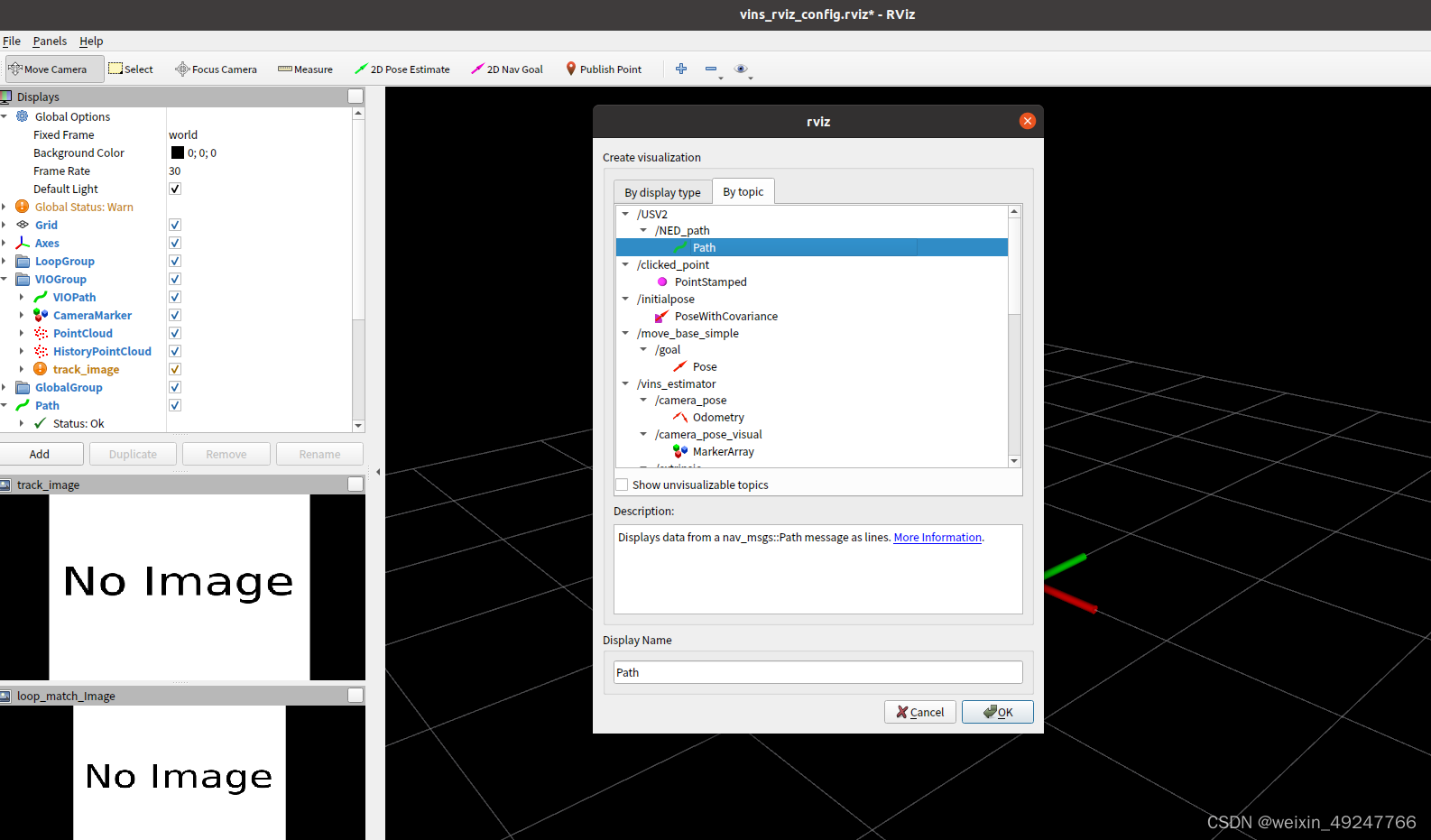
2、RVIZ轨迹显示
运行SLAM系统,并运行RVIZ,在RVIZ中根据话题添加可视化组件
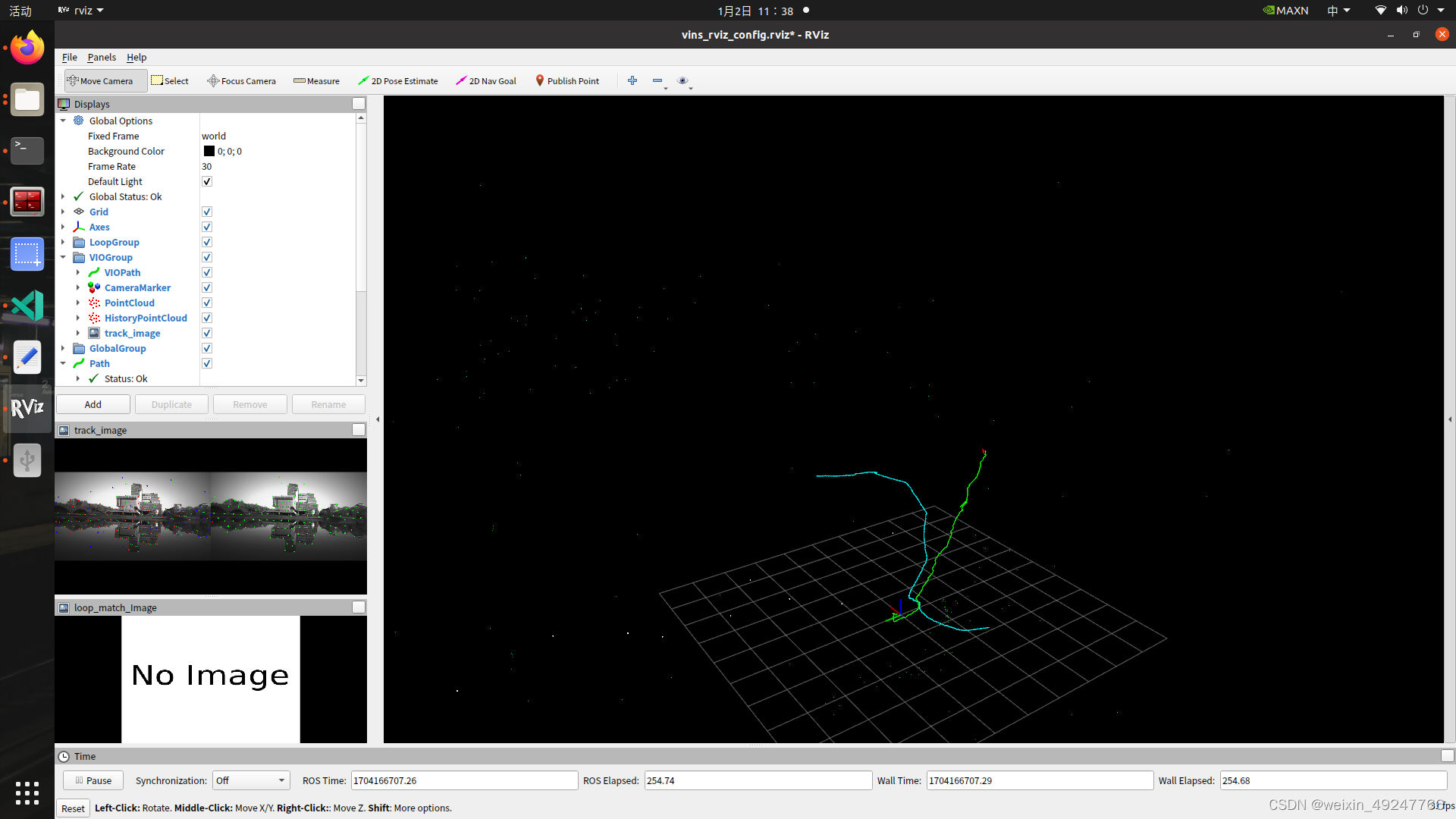
运行SLAM系统即数据集之后即可显示对应的轨迹,效果如下:
如果需要修改参数,只需要在showtrack.cpp文件中修改对应的地方即可

















 1316
1316

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









